Messungen mit einem vektoriellen Netzwerkanalysator (VNA oder VNWA) sind eine wahre Freude. Sie sind heute z.T. für weniger als 100 Euro zu kaufen, wer etwas besseres will kann auch deutlich mehr Geld ausgeben. Mehr als einige hundert Euro ist für Amateure, die meist unter 1 GHz arbeiten, aber nicht notwendig. Ich selbst verwende seit etwa 10 Jahren den DG8SAQ VNWA, der bis 1,3 GHz funktioniert und für meine Zwecke völlig ausreichend ist.
Messungen damit sind aber immer nur dann direkt möglich, wenn die Impedanzen der verwendeten Ports bei 50 Ω liegen. Davon abweichende Impedanzen ergeben Meßfehler. Daher ist es beispielsweise nicht trivial, den Frequenzgang eines 16:1 Transformators zu messen, wie er zum Betrieb einer endgespeisten Antenne benötigt wird. Ein solcher Trafo transformiert eine Eingangsimpedanz von 50 Ω auf eine Ausgangsimpedanz von 800 Ω. Zur Messung muß daher die Ausgangsimpedanz wieder auf 50 Ω transformiert werden.
Diese Rücktransformation kann man auf zwei Wegen erreichen. Am offensichtlichsten ist es, einen zweiten Trafo gleicher Bauart umgekehrt zu betreiben, so daß er von 800 Ω auf 50 Ω zurücktransformiert. Man kann aber auch ein Pi-Glied aus Widerständen verwenden, das am Ein- und Ausgang die benötigten Impedanzen hat. Die Lösung mit den Trafos hat den Vorteil geringerer Dämpfung und den Nachteil des nichtlinearen Frequenzverlaufs. Das Widerstandsnetzwerk bietet einen recht linearen Dämpfungsverlauf ohne große Überraschungen bei speziellen Frequenzen, hat dafür aber eine mehr oder weniger hohe Dämpfung. Für beide Lösungen habe ich eine handvoll Leiterplatten fertigen lassen, die ich nachfolgend beschreibe.
Das Pi-Glied
Die Schaltung ist naturgemäß trivial und besteht eigentlich nur aus drei Widerständen.
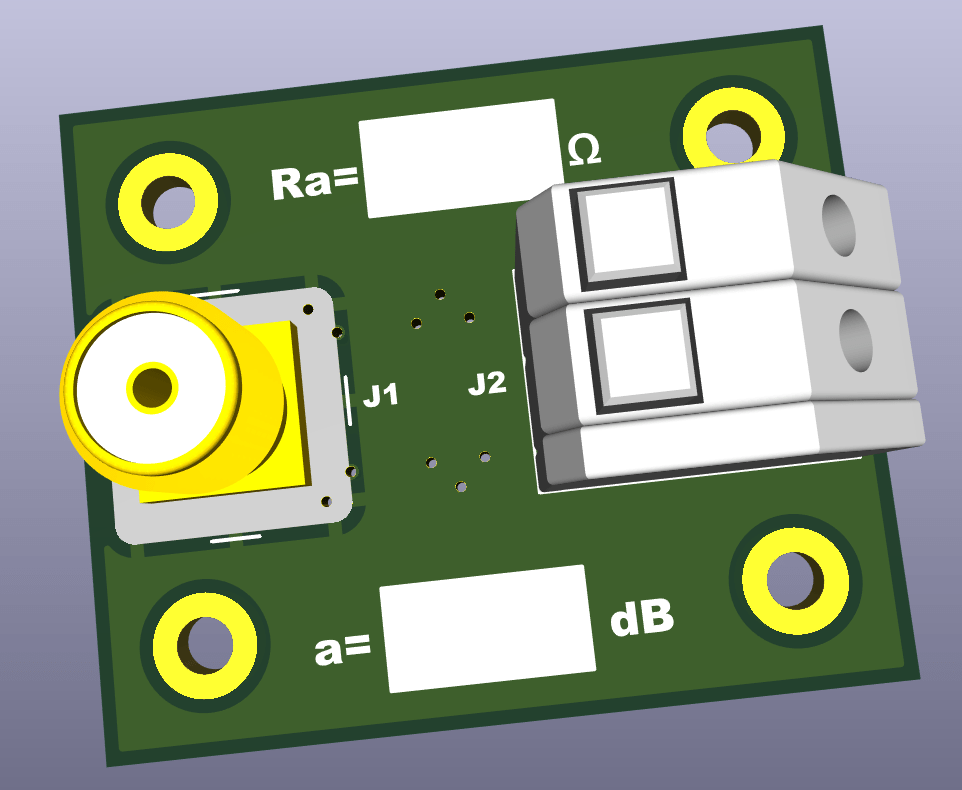
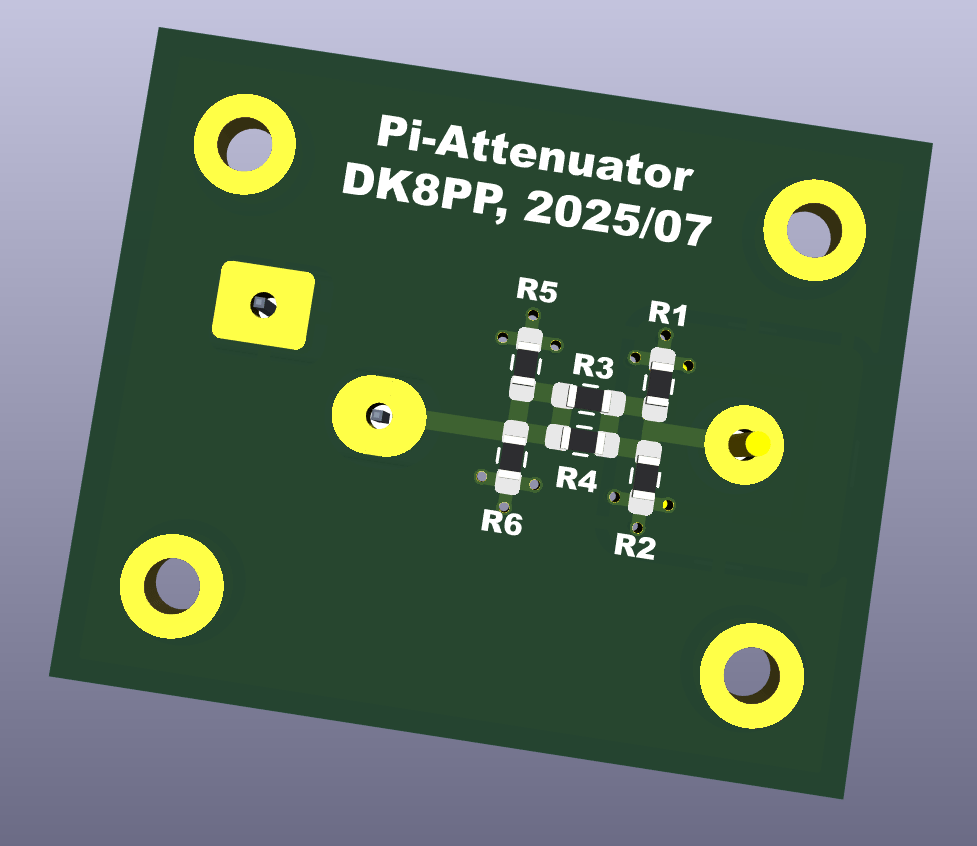
Um mit gut verfügbaren Metallfilmwiderständen der E24er-Reihe auszukommen und trotzdem eine gute Genauigkeit zu erzielen, habe ich jeweils zwei parallele Widerstände vorgesehen. Wie im Schaltplan dokumentiert, können daraus die benötigten Gesamtwiderstände mit Abweichungen von weniger als 0,3 % zusammengesetzt werden. Notfalls, wie bei dem 800 Ω Pi-Glied, kann man auch mal zwei Widerstände übereinander löten. Die nötigen Gesamtwiderstände wurden mit den KiCad-Berechnungswerkzeugen berechnet und zwar unter der Bedingung einer gut handhabbaren ganzzahligen Dämpfung. Um daraus die benötigten Einzelwiderstände zu berechnen, habe ich mein eigenes Tool ParSer verwendet. KiCad kann das aber auch. Es wurden SMD-Widerstände der Baugröße 0603 verwendet, was gerade noch von Hand machbar ist. Hier die 3D-Ansicht:
Pi-Glied, OberseitePi-Glied, Unterseite
Als Eingangsbuchse wurde SMA verwendet, die Ausgangsseite ist mit einem Wago 250–202 Klemmverbinder bestückt. Die Impedanz weicht ja ohnehin von 50 Ω ab und so kann ein Testobjekt direkt angeklemmt werden. Auf den weißen Feldern des Bestückungsdrucks werden handschriftlich der Ausgangswiderstand und die Dämpfung notiert.
Der Transformator
Der Schaltplan des Anpassungsnetzwerks mit Transformator ist noch trivialer, als der des Pi-Glieds.
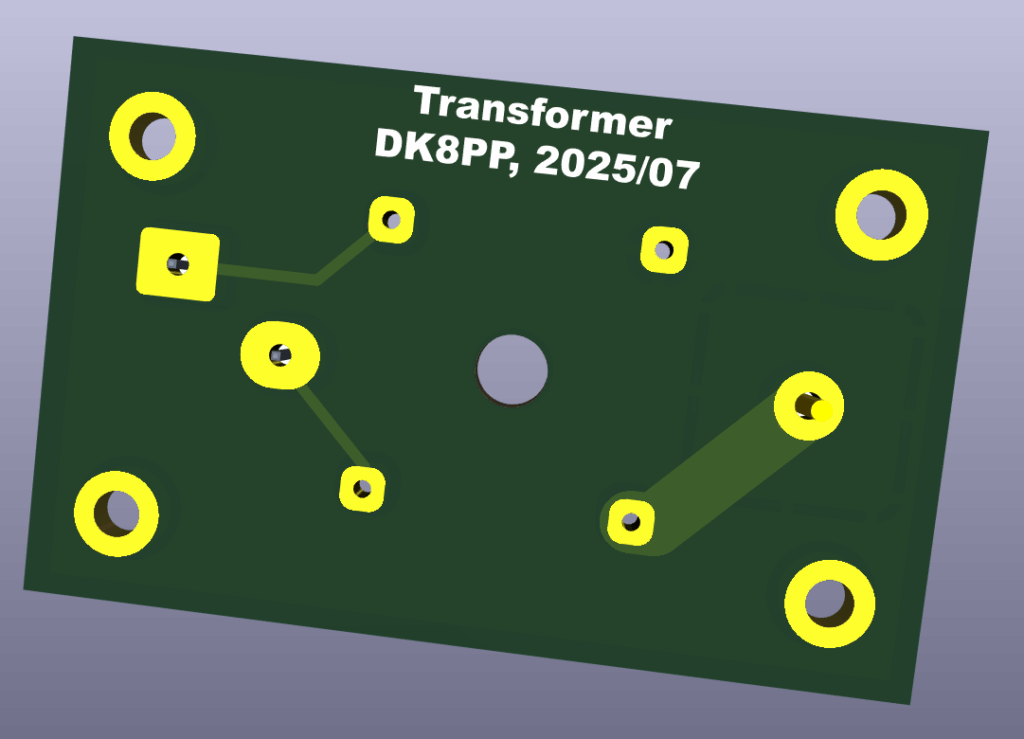
Die hier gezeigte Potentialtrennung verfälscht die Messungen. Daher wurden auf dem Prototyp die Pins 2 und 3 mit einer Drahtbrücke verbunden. Hier nun wieder die 3D-Ansicht:
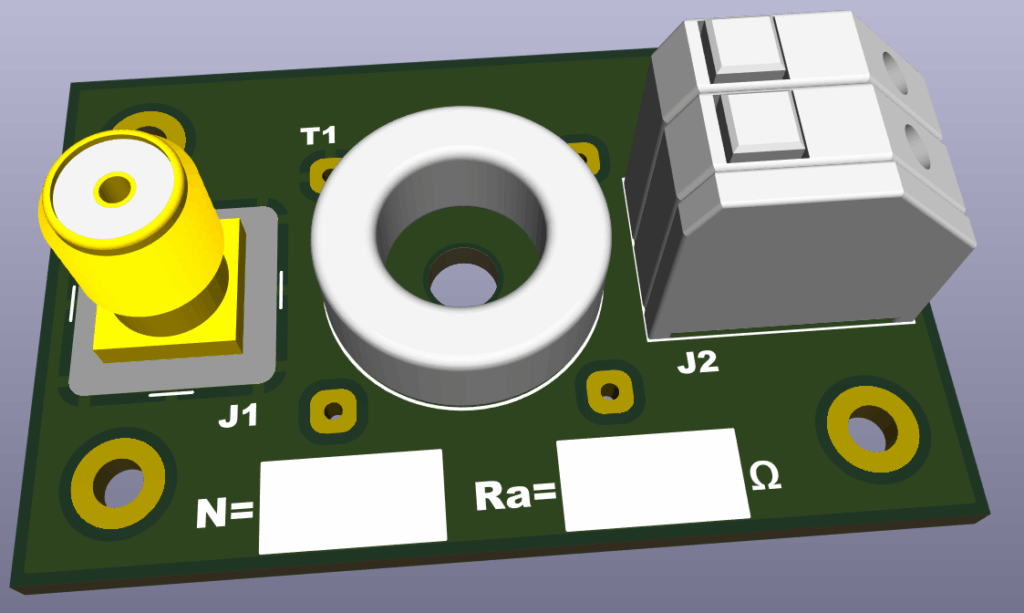
Trafo, OberseiteTrafo, Unterseite
Als Ringkerngröße wurde die des FT-50 gewählt (0,5″ Außendurchmesser). Da es bei Messungen um minimale Leistungen geht, wären auch kleinere Kerne möglich, die aber nicht mehr so leicht bewickelbar sind. Man will sich ja nicht die Finger brechen. Auch hier wird wieder handschriftlich das Wicklungsverhältnis und die Ausgangsimpedanz dokumentiert.
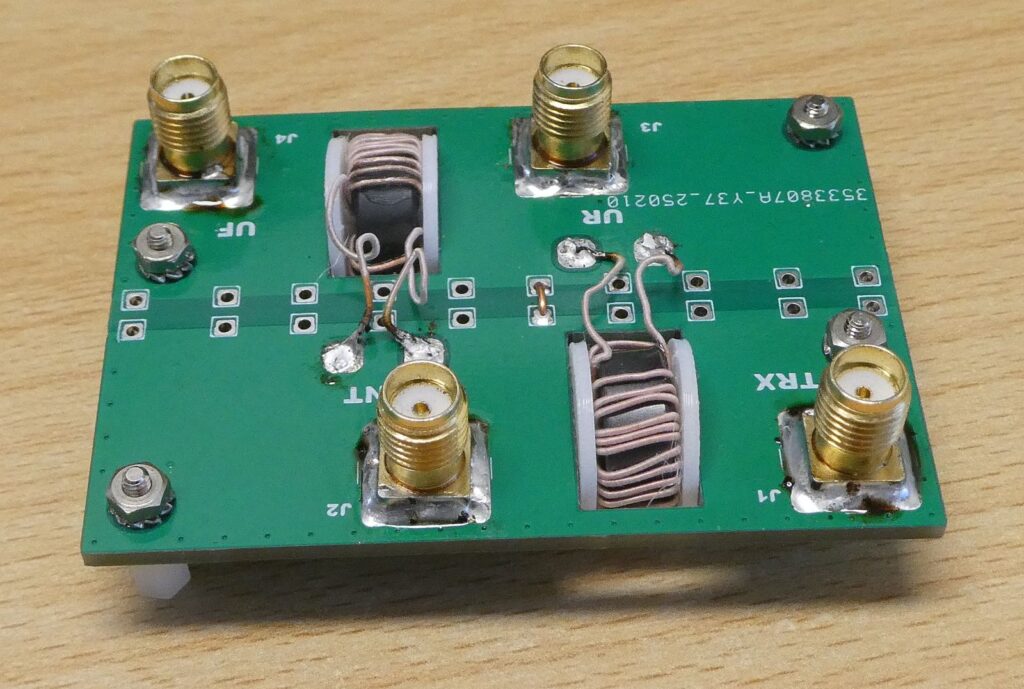
Zum Testen wurden zwei 50Ω-800Ω Pi-Dämpfungsglieder und ein Trafo mit 4 und 16 Windungen auf einem FT 50–43-Kern aufgebaut. Nachfolgend werden die Meßergebnisse dokumentiert.
Messungen am Pi-Glied
Die Wago Klemmverbinder der beiden gleichartig aufgebauten Pi-Glieder wurden über kurze Leiterstücke direkt miteinander verbunden. Dabei wurde darauf geachtet, daß die beiden Massen miteinander verbunden sind. Wenn sich die beiden Boards gegenüberliegen, sind die Leitungen daher gekreuzt.
Es wurden s11 und s21-Messungen bis 150 MHz in beiden Richtungen durchgeführt. Hier die Ergebnisse:
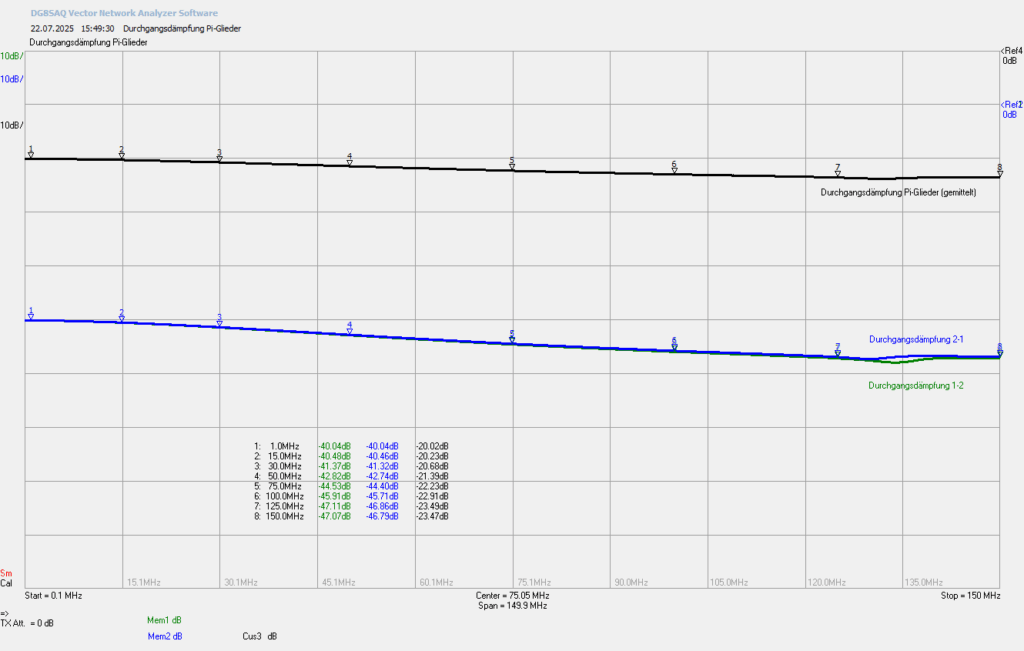
Durchgangsdämpfung der Pi-Glieder
Die blauen und grünen Kurven zeigen die Durchgangsdämpfungen je Richtung. Erwartungsgemäß sind die Abweichungen praktisch richtungsunabhängig, mit vernachlässigbaren Abweichungen bei 135 MHz. Die schwarze Kurve zeigt die gemittelte Dämpfung für ein Pi-Glied. Das ist mit der VNWA-Betriebssoftware leicht zu erreichen:
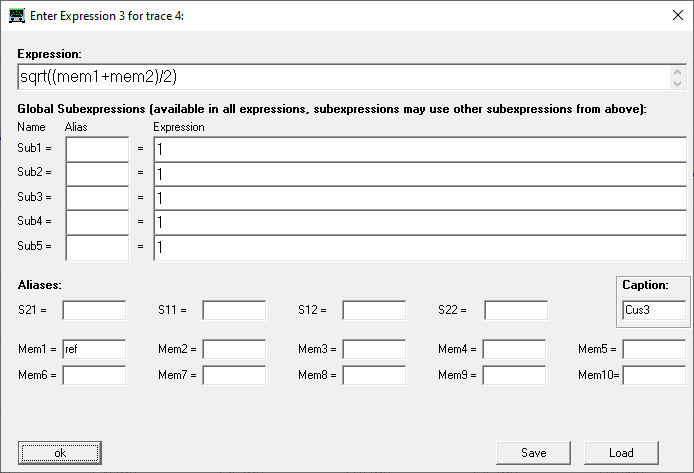
Berechnung der Dämpfung eines Pi-Glieds aus dem Mittelwert der Dämpfungen beider Pi-Glieder
Die Speicher mem1 und mem2 enthalten die jeweils gemessenen Durchlassdämpfungen s21 als Spannungsverhältnisse. Die Quadratwurzel aus deren Mittelwert ist dann das rechnerische Spannungsverhältnis eines einzelnen Pi-Glieds unter der Annahme, das jedes davon gleich viel zur Dämpfung beiträgt.
Wie erwartet liegt diese mittlere Dämpfung zunächst bei 20 dB und steigt dann bei gut 100 MHz um 3 dB an. Das ist für Meßzwecke gut zu handhaben. Die schwarze Kurve mit dieser mittleren Dämpfung wird in einer .s1p Touchstone Datei gespeichert und bei den nachfolgenden Messungen zur Korrektur weiterverwendet.
Messungen am Trafo
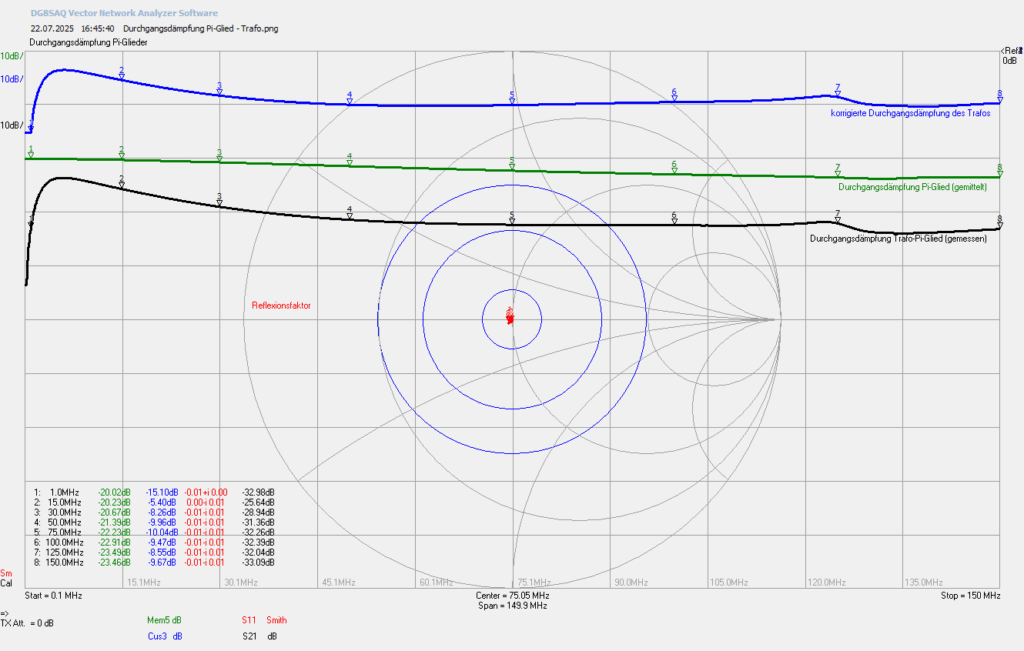
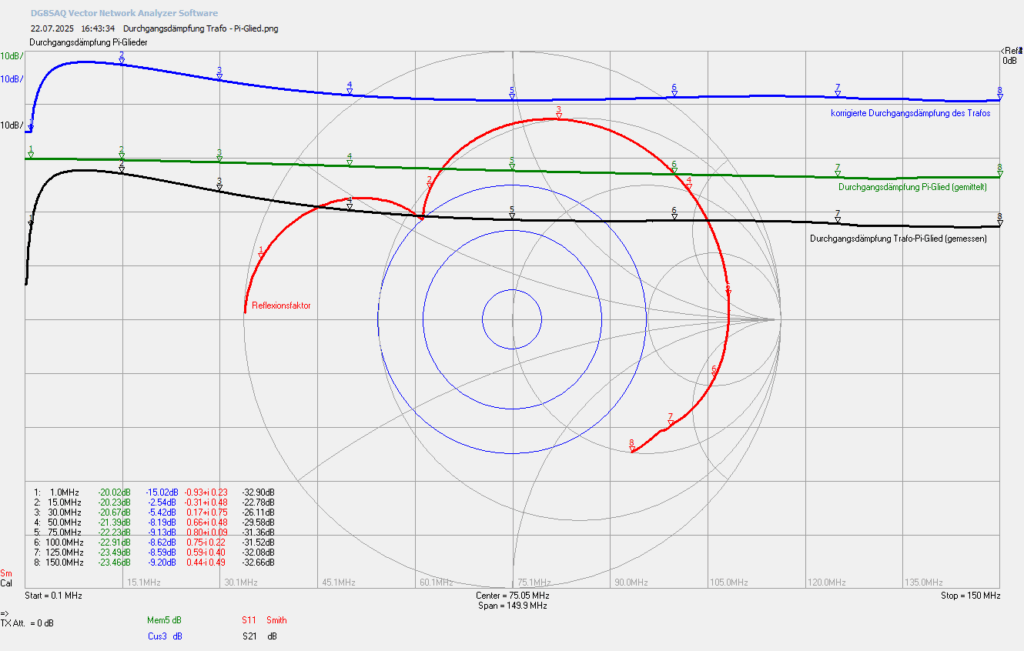
Exemplarisch wurde ein Trafo mit 4 und 16 Windungen auf einem FT 50–43-Kern aufgebaut. Er hat also rechnerisch auf der Ausgangsseite die 16-fache Impedanz des Eingangs. Hier die Messungen links mit dem Pi-Glied als Eingang und rechts mit dem Trafo als Eingang:
s11 und s21-Messungen mit resistivem Pi-Glied am Eingang und Transformator am Ausgangs11 und s21-Messungen mit Transformator am Eingang und resistivem Pi-Glied am Ausgang
Wie oben schon erwähnt, wurden die Pins 2 und 3 des Trafos verbunden, damit es keine schwebenden Potentiale gibt. Bei Verbindung des Trafos und des Pi-Glieds muß wieder auf die korrekte Polung geachtet werden: beide Masseleitungen müssen miteinander verbunden sein.
Die schwarze Linie zeigt die gesamte gemessene Durchlassdämpfung des Trafos und des Pi-Glieds. Die um die Dämpfung des Pi-Glieds korrigierte Dämpfung, die auf den Trafo entfällt, ist in blau gezeigt. Die Berechnung dieser Korrektur (grün) wurde im vorherigen Kapitel gezeigt.
Es wurden jeweils auch die Reflexionen s11 gemessen. Erwartungsgemäß liegt dabei die Impedanz des Pi-Glieds bei 50 Ω, während die des Trafos stark variiert. Die Durchlasscharakteristik ist im Rahmen der Meßgenauigkeit gleich.
Erkenntnis
Die Dämpfung des Trafos ist bei niedrigen Frequenzen erwartbar hoch und wird bei ungefähr 6 MHz minimal. Ab da steigt die Dämpfung wieder mit der Frequenz. Das bestätigt die alte Bauernregel, daß der induktive Widerstand einer Spule mindestens fünfmal so groß sein sollte wie der Ausgangswiderstand des Treibers. Vier Windungen auf einem FT 50–43-Kern mit einem AL-Wert von 523 nH/W² ergeben etwa 8,4 µH Induktivität und einen induktiven Widerstand von 5×50 Ω = 250 Ω bei knapp 5 MHz.
Es gibt geringfügige Unterschiede zwischen beiden gemessenen Varianten. Mit dem Trafo am Eingang ist die Dämpfung bei niedrigen Frequenzen etwas geringer. Die Ursache der Unterschiede müsste man genauer untersuchen, es könnten auch Meßfehler sein, aber auch die niedrige Dämpfung von etwa 3 dB ist für Leistungsanwendungen zu hoch. Nun ist der verwendete Kern sowieso nicht dafür geeignet, aber tendenziell bestätigt es meine früheren Versuche mit den üblicherweise verwendeten größeren Ringkernen der Größe FT-240. Sie heizen sich selbst bei „nur“ 100 Watt Ausgangsleistung mitunter auf Temperaturen oberhalb der Curie-Temperatur auf und verlieren dann ihre magnetischen Eigenschaften vollständig. Kein Wunder, 3 dB Verlust sind 50 Watt!
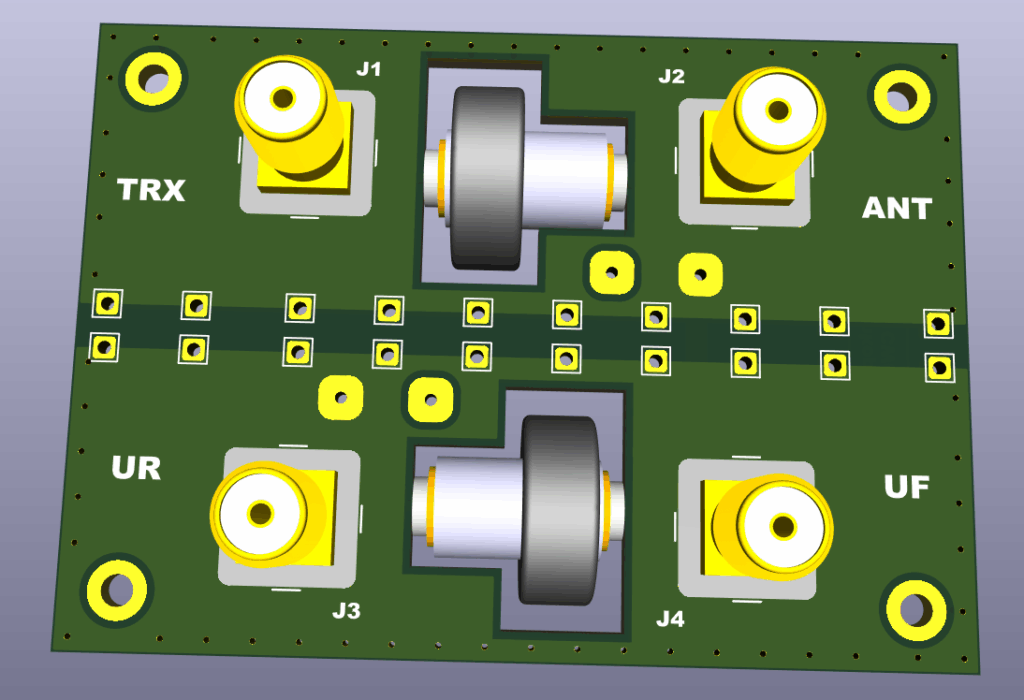
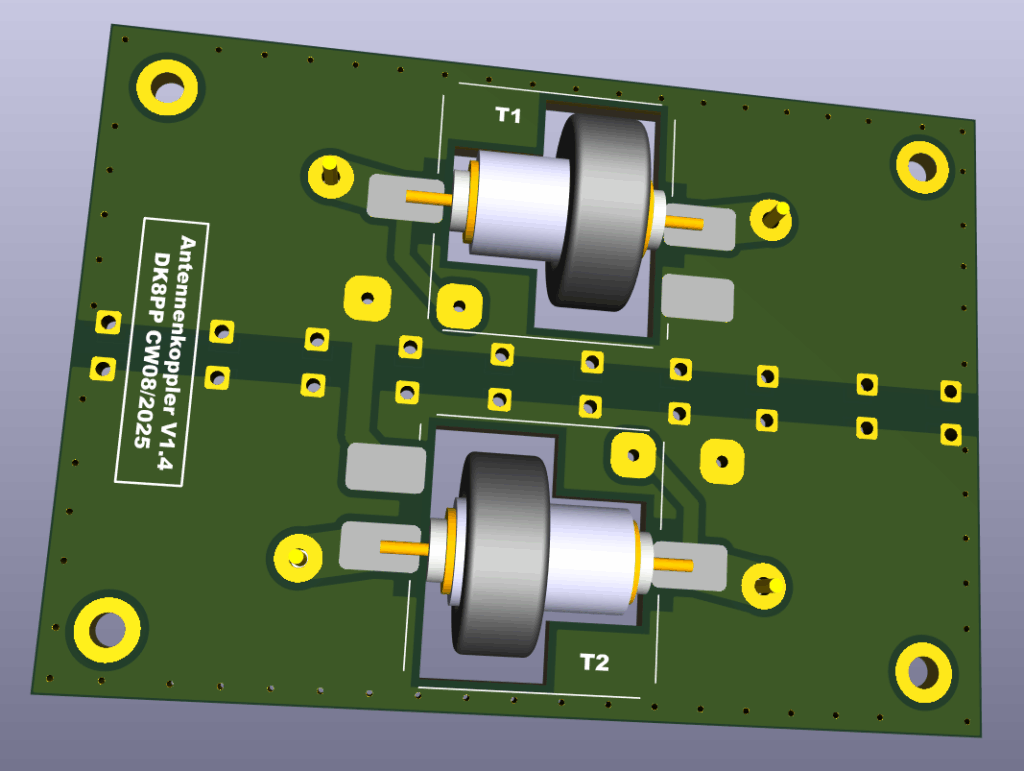
Nein, ich bin nicht von Richtkopplern besessen, aber leider hat bisher noch keiner meiner Versuchsaufbauten meine Erwartungen voll erfüllt. Da ich gerade für ein anderes Projekt wieder Leiterplatten bestellt habe, kam gleich noch ein etwas angepasstes Design für einen weiteren Richtkoppler hinzu, nunmehr die Version 1.4. Ich bin zum klassischen Design zurückgekehrt, also mit einem Stück abgeschirmten Koaxkabel im Inneren der Ringkerne. Getrennte Masseflächen habe ich beibehalten, sie können ja bei Bedarf mit einer oder mehreren Lötbrücken kurzgeschlossen werden.
Die Abschirmung der Primär- und Sekundärwicklungen, der Außenleiter des Koaxkabels, ist hier explizit eingezeichnet. Sie hat sich bei den vorherigen Versuchen als entscheidend für die Isolation und damit auch die Richtschärfe erwiesen. Beide Abschirmungen liegen an der Masse des Transceivers und der Antenne, hier als GND1 bezeichnet. Die 3D-Ansichten und das KiCad-Projekt:
Der Anschluß der Abschirmung von T2 an GND1 führt leider zu einer Unterbrechung der Massefläche auf der Unterseite, was aber auf der Oberseite wieder kompensiert wird. Nachfolgend werden nun die Meßergebnisse dokumentiert.
Messungen mit Potentialtrennung
Die ersten Messungen habe ich mit der fertig aufgebauten Leiterplatte und getrennten Potentialen von GND1 und GND2 durchgeführt.
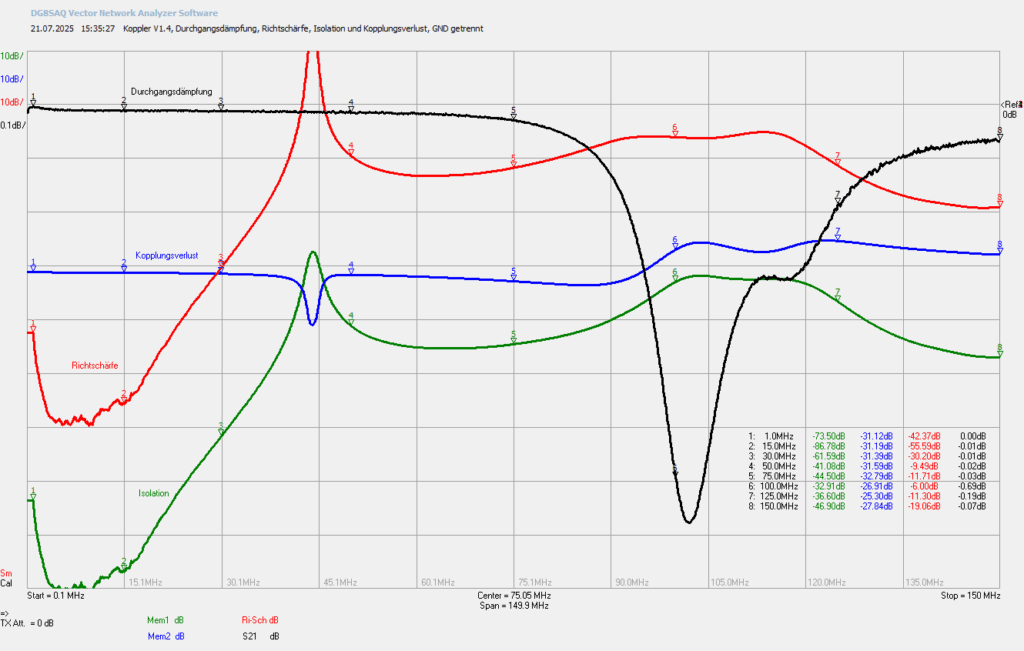
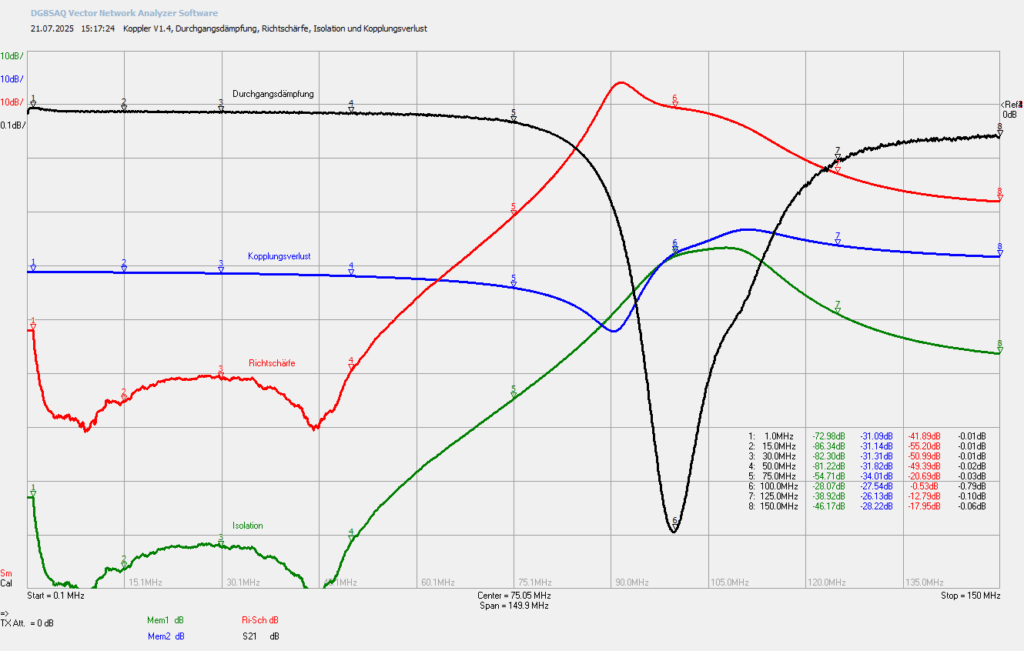
Meßergebnisse bei Potentialtrennung, je 50cm Koaxkabel am Eingangs- und Ausgangsport
Die Durchgangsdämpfung liegt im gewohnten Bereich von 0,01 dB, hart an der Grenze der Auflösung des Netzwerkanalysators. Der Kopplungsverlust liegt wie erwartet um 31,2 dB, denn die Transformatoren haben jeweils 36 Windungen auf je einem FT 50–43-Kern, was rechnerisch 31,126 dB erwarten lässt (10*log(36²)). Isolation und daraus errechnete Richtschärfe sind bis etwa 20 MHz sehr gut und steigen dann aber unerwartet schnell an. Bei knapp 45 MHz ist eine Resonanz zu erkennen, die zunächst unerwartet ist. Eine weitere Resonanz liegt bei etwa 100 MHz. Wegen der 0,1 dB Skalierung der Durchgangsdämpfung sieht sie dramatischer aus, als sie wirklich ist. Auch weil sie jenseits des vorgesehenen Einsatzbereichs von maximal 70 MHz liegt, soll sie hier ignoriert werden.
Die Resonanz bei 45 MHz lässt sich mit der Länge der Meßleitungen erklären. Wegen der Potentialtrennung schweben die Massepotentiale am Koppler und werden erst am Netzwerkanalysator wieder kurzgeschlossen. Das sind 2 * 50 cm Kabel, mit Steckverbindern also in Summe vielleicht 1,10 m. Das ergibt mit einem Verkürzungsfaktor von 0,66 gerechnet bei 45 MHz genau λ/4.
Messungen mit Potentialtrennung und Direktanschluß am Port 2
Eine Messung ohne Kabel ist leider nicht möglich, aber ich kann ja testweise und mit mechanischen Verrenkungen wenigstens auf ein Kabel verzichten. Hier ist das Ergebnis, wenn Port 2 direkt an den Netzwerkanalysator angeschlossen wird:
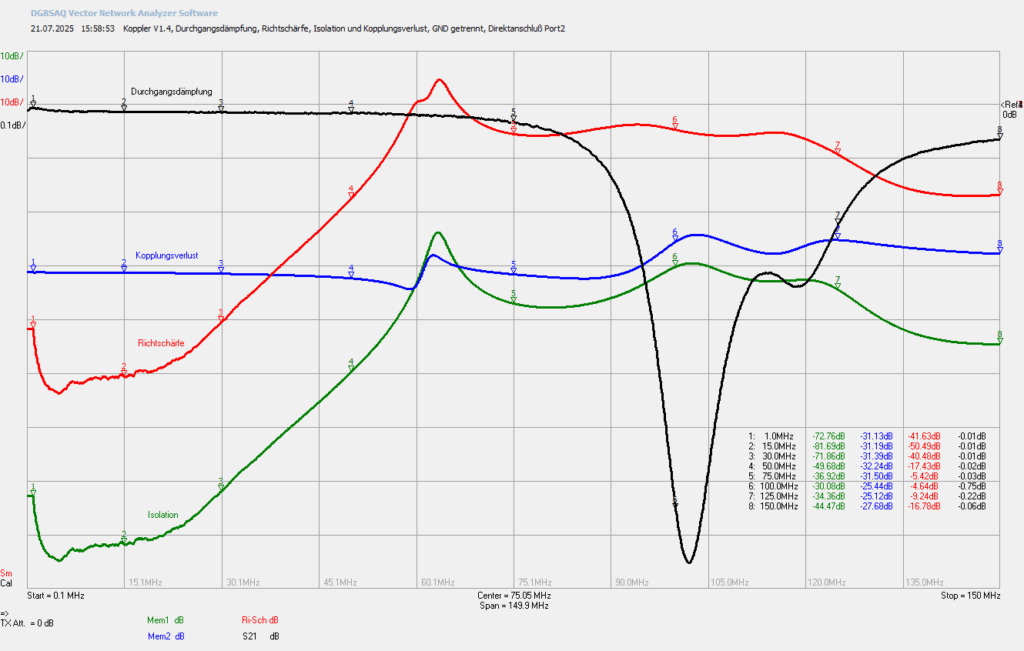
Meßergebnisse bei Potentialtrennung, 50cm Koaxkabel am Eingangsport, Direktanschluß des Ausgangsports
Die Resonanzstelle verschiebt sich deutlich nach oben. Das zeigt, daß es sich dabei um ein Artefakt durch die potentialgetrennten Masseanschlüsse handeln muß.
Messungen ohne Potentialtrennung
Gibt man die Potentialtrennung komplett auf und schließt die Masseflächen kurz, ergeben sich folgende Meßergebnisse:
Meßergebnisse ohne Potentialtrennung, je 50cm Koaxkabel am Eingangs- und Ausgangsport
Interessanterweise sieht man auch hier wieder bei knapp 45 MHz ein lokales Minimum, was mutmaßlich wieder an den beiden 50 cm langen Meßkabeln liegt.
Die Richtschärfe bleibt bis knapp 50 MHz unter 50 dB, steigt dann aber schnell an. Bei 75 MHz werden nur noch 20 dB erreicht, was aber durchaus für viele Zwecke noch ausreichend ist. Der Koppler ist also bis ins 6‑m-Band gut brauchbar, mit Einschränkungen auch noch im 4‑m-Band. Jetzt könnte man noch erforschen, ob leitende Trennwände die Isolation gerade bei den höheren Frequenzen verbessern können. Dazu habe ich aber offen gesagt im Moment keine Lust. Die Performance im erweiterten Kurzwellenbereich reicht mir.
In der Hochfrequenztechnik begegnet man immer wieder den Begriffen Reflexionsfaktor und Smith-Diagramm. Man lernt, damit umzugehen und das Smith-Diagramm zum Entwurf von Anpassungsnetzwerken zu nutzen. Warum das Smith-Diagramm aber kreisförmig ist und seltsam gebogene Koordinaten hat, bleibt meist ein Mysterium. Und was hat das Ganze denn überhaupt mit dem Reflexionsfaktor zu tun?
Schon vor einigen Monaten hatte ich einen Beitrag veröffentlicht, der die Konstruktion des Smith-Diagramms mit den Qt-Grafikfunktionen zeigt. Das Programm war noch sehr provisorisch zusammengedengelt und ich habe es jetzt weitgehend überarbeitet. Das betrifft mehr den Quelltext, als die Anzeige. Dennoch habe ich auch das Benutzerinterface verbessert, so daß das Ganze eine „Lernhilfe“ in Sachen Reflexionsfaktor und Smith-Diagramm sein soll. Für reine Anwender, die einfach nur mit dem Smith-Diagramm arbeiten wollen, empfehle ich SimSmith (inzwischen offensichtlich in SimNEC umbenannt) von Ward Harriman, AE6TY oder Smith von Fritz Dellsperger.
Der Reflexionsfaktor
Die Reflexion einer elektromagnetischen Welle ist ein fundamentales Phänomen ihrer Ausbreitung. Nur wenn die Welle auf einen Wirkwiderstand trifft, der genauso groß ist, wie der Wellenwiderstand der Übertragungsleitung, wird sie vollständig absorbiert (abgestrahlt oder in Wärme umgewandelt). Bei jedem anderen Wirk- oder Blindwiderstand wird ein Teil oder die komplette Welle reflektiert. Dabei kann eine Phasenverschiebung auftreten, so daß der Reflexionsfaktor, das Verhältnis der vorlaufenden Welle zur reflektierten Welle keine reelle, sondern eine komplexe Zahl ist (siehe Formelsammlung). Diese Zahl wird üblicherweise mit Gamma (Γ) bezeichnet und mit einem Unterstrich versehen, der sie als komplexe Zahl kennzeichnet. In der Zweipoltheorie wird Gamma üblicherweise mit s11 gekennzeichnet.
Aus Gründen der Energieerhaltung kann die Spannung der reflektierten Welle nie höher sein, als die der vorlaufenden Welle. Die Impedanz der Übertragungsleitung ist ja für beide Richtungen gleich. Damit kann der Betrag von Gamma nur zwischen 0 und 1 liegen. Die Phasenverschiebung kann zwischen 0° und 360° variieren und daraus ergibt sich für den Reflexionsfaktor der Einheitskreis in der komplexen gaußschen Zahlenebene.
Beispiel
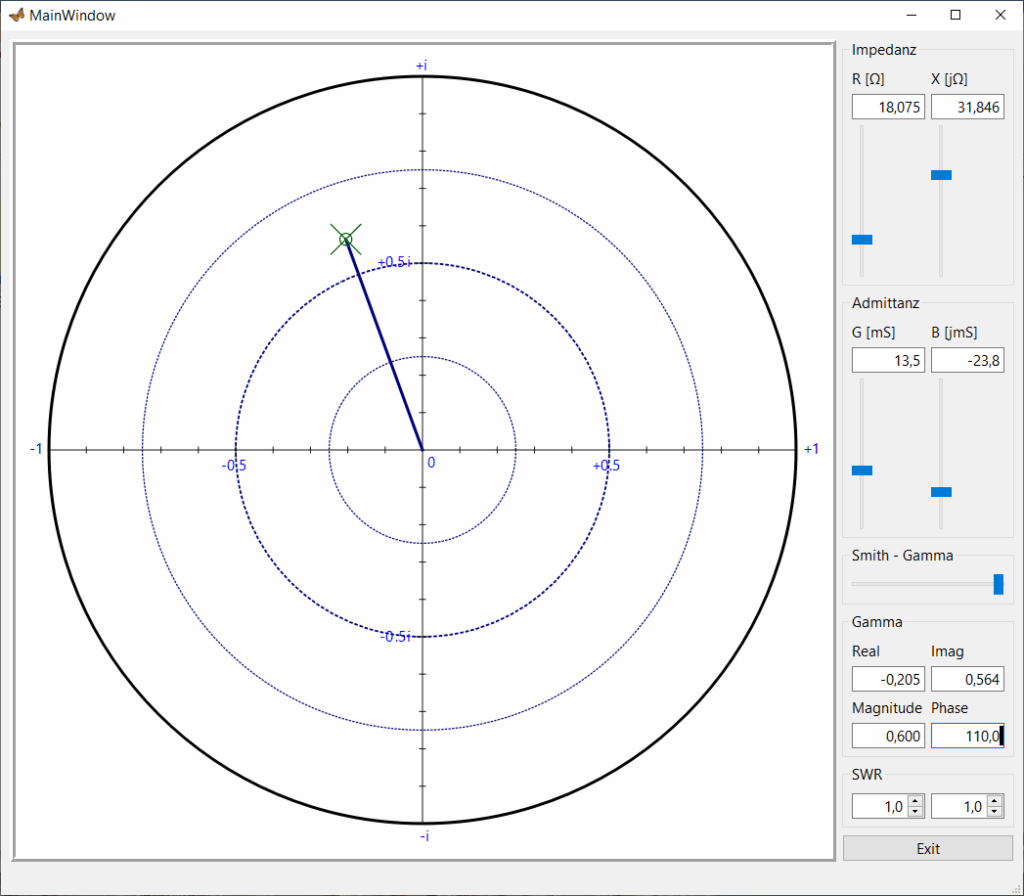
Das nachfolgende Diagramm zeigt exemplarisch einen Reflexionsfaktor mit einer Magnitude von 0,6 und einer Phasenverschiebung von 110°:
Reflexionsfaktor mit Betrag 0,6 und Phase 110°
Die Koordinaten des Reflexionsfaktors können, wie hier, sehr anschaulich in einem Polarkoordinatensystem als Betrag und Phasenwinkel angegeben werden. Der Betrag, auch Magnitude genannt, ist die Länge der blauen Verbindungslinie vom Ursprung zum Marker. Der Phasenwinkel ist der Winkel zwischen der in positive Richtung zeigenden Horizontalachse und der Verbindungslinie. Wie in der Mathematik üblich, steigt der Winkel entgegen der Uhrzeigerrichtung.
Genauso gut kann der Reflexionsfaktor aber auch in karthesischen Koordinaten mit ihrem Realteil und Imaginärteil angegeben werden. Der Realteil ist dabei der Wert auf der x‑Achse, der Imaginärteil der Wert auf der y‑Achse. In karthesischen Koordinaten entspricht ein Gamma von (0,6/110°) einem Wert von (-0,205+j0,564)
Alle physikalisch möglichen Reflexionsfaktoren liegen innerhalb des gezeigten Einheitskreises. Alle reinen Impedanzen mit einem Wirkwiderstand von 0 Ω (ideale Spulen oder Kondensatoren) liegen auf dem Einheitskreis (Magnitude = 1). Wenn der Wirkwiderstand größer als 0 Ω ist, liegt der zugehörige Reflexionsfaktor innerhalb des Kreises und seine Magnitude ist kleiner als 1.
Einige Sonderfälle sollen kurz beschrieben werden.
Reflexionsfaktor 0
Das ist der Koordinatenursprung im Zentrum des Einheitskreises. Es tritt keine Reflexion auf, die Leitung ist mit ihrem Wellenwiderstand abgeschlossen.
Reflexionsfaktor ‑1
Das ist der linke Punkt auf der horizontalen Achse, ein Kurzschluß, 0 Ω. Es tritt Totalreflexion mit einer Phasendrehung um 180° auf.
Reflexionsfaktor +1
Das ist der rechte Punkt auf der horizontalen Achse, ein offenes Leitungsende, unendlich hoher Widerstand. Es tritt Totalreflexion ohne Phasendrehung auf.
Reflexionsfaktor +j
Das ist der obere Punkt auf der vertikalen Achse. Es tritt Totalreflexion mit einer Phasendrehung um 90° auf. Es ist eine Induktivität am Leitungsende angeschlossen, deren Blindwiderstand dem Wellenwiderstand der Leitung entspricht.
Reflexionsfaktor ‑j
Das ist der untere Punkt auf der vertikalen Achse. Es tritt Totalreflexion mit einer Phasendrehung um ‑90° auf. Es ist eine Kapazität am Leitungsende angeschlossen, deren Blindwiderstand dem Wellenwiderstand der Leitung entspricht.
Das Smith-Diagramm
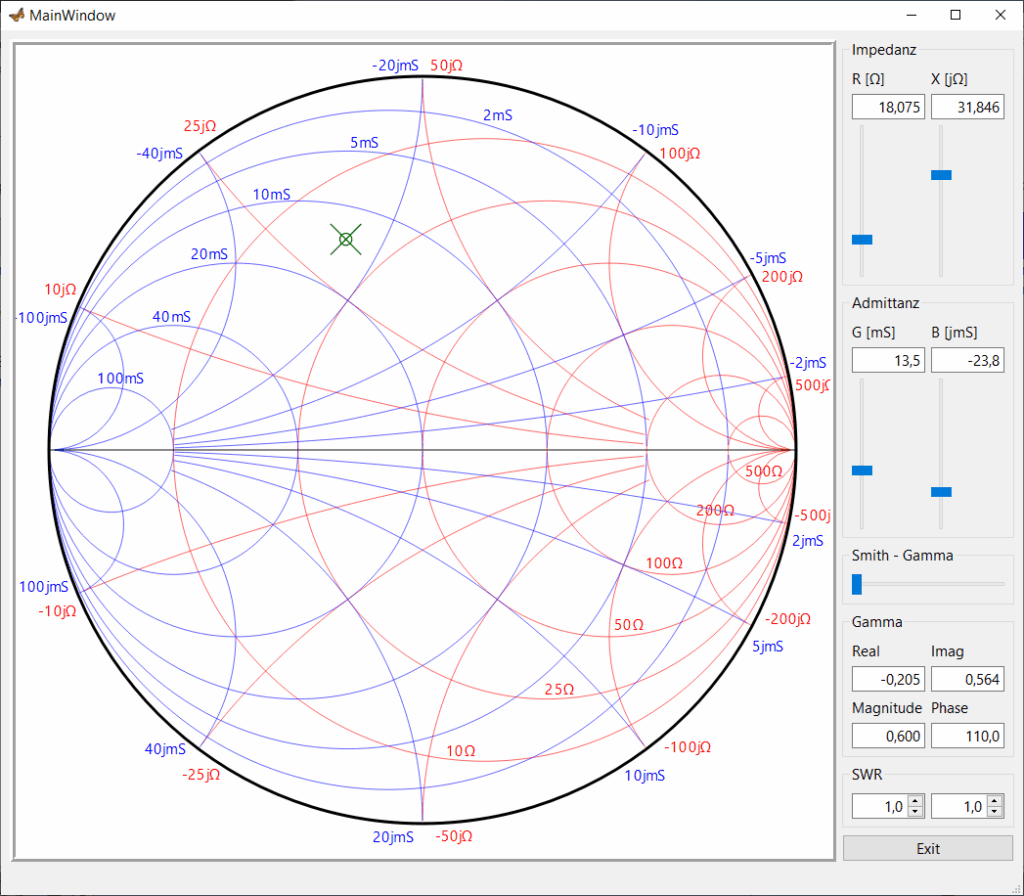
Es fällt auf, daß das Smith-Diagramm genauso kreisförmig ist, wie das oben gezeigte Diagramm des Reflexionsfaktors. So ein Zufall aber auch! Hier dasselbe Beispiel wie oben für den Reflexionsfaktor:
Smith-Diagramm für einen Reflexionsfaktor mit Betrag 0,6 und Phase 110°
Beim Vergleich beider Darstellungen erkennt man nur einen Unterschied, die Beschriftung. Das Smith-Diagramm zeigt also nichts anderes als den Reflexionsfaktor, nur daß die Achsen anders beschriftet sind. Gamma kennzeichnet ein Spannungsverhältnis, nämlich das der rücklaufenden Spannung zur vorlaufenden Spannung. Das Smith-Diagramm zeigt die auf Impedanz und Admittanz umgerechneten Werte des Reflexionsfaktors.
Die Umrechnung geschieht über die hier bereits gezeigten Formeln, die nachfolgend nochmal wiederholt werden, weil sie so zentral wichtig sind:
und
Für jedes beliebige Gamma lässt sich also bei gegebenem Wellenwiderstand Z0 eine eindeutige Lastimpedanz ZL errechnen. Daraus ergibt sich durch Bildung des komplexen Kehrwerts auch gleich die Admittanz YL. Für das oben gezeigte Beispiel ist die Lastimpedanz also 18,075+j31,846 Ω und die Lastadmittanz ist 13,5+j23,8 mS (Millisiemens). Als Wellenwiderstand sind z.Zt. 50 Ω fest im Quellcode codiert, er ist noch nicht einstellbar.
GammaSmith
Die oben gezeigten Grafiken sind Screenshots des neuen Programms GammaSmith. Mit Hilfe der Schieberegler oder der Eingabefelder kann der Wirkwiderstand R, der Blindwiderstand X, der Wirkleitwert G oder der Blindleitwert B eingestellt werden. Der daraus errechnete Reflexionsfaktor Gamma wird in karthesischen und in Polarkoordinaten unten rechts angezeigt. Der Marker wird auf den errechneten Reflexionsfaktor positioniert. Mit dem horizontalen Schieberegler „Smith-Gamma“ kann zwischen der Anzeige des Smith-Diagramms und des Reflexionsfaktors Gamma überblendet werden.
Gamma kann auch direkt in den zugehörigen Feldern in karthesischen oder Polarkoordinaten eigegeben werden. Außerdem ist der Marker direkt mit der Maus verschiebbar und die zugehörige Impedanz, Admittanz und Gamma werden dann in den Feldern angezeigt. Außerdem können ein oder zwei SWR-Kreise angezeigt werden, indem man in die beiden Spinboxen einen Wert größer 1,0 eingibt.
Qt erwartet zu recht von seinen Anwendern, daß sie klare Lizenzbedingungen passend zu ihren eigenen Bedingungen anwenden. Mein bisheriges „mach damit, was Du willst“ ist juristisch nicht fassbar und schützt mich selbst vermutlich nicht vor irgendwelchen hypothetischen Angriffen. Qt empfiehlt daher, eigene Software unter GPL oder LGPL zu stellen. Dem komme ich gerne nach, zumal ich deren hervorragende Entwicklungsumgebung kostenlos nutzen darf.
Mangels juristischem Grundstudium (nicht mal auf Politiker-Niveau „hat widerwillig die Einführungsvorlesung besucht und sich dann doch lieber für eine parteipolitische Laufbahn entschieden, behauptet aber, er/sie/es habe Jura studiert.“) fällt mir eine eigene Abwägung schwer. Ich habe auch nicht die Absicht, mich tagelang mit dem Thema zu beschäftigen und habe mich für die LGPL entschieden, die nach meinem rudimentären Verständnis meinen Vorstellungen am nächsten kommt. Hier nun die neue Version von GammaSmith, mit Info-Button, um die Lizenzbedingungen anzuzeigen. Sie wurden auch in die Kommentare im Quellcode einmassiert. Funktional hat sich gegenüber der Vorgängerversion nichts geändert.
Das unter Windows ausführbare Programm kann hier heruntergeladen werden:
Zum Erstellen wird die Qt-Entwicklungsumgebung benötigt, bei mir z.Zt. Qt Creator 18.0.0, auf Qt 6.9.1 beruhend.
Auch unter Linux kann diese Version kompiliert werden, ich habe das in einer virtuellen Ubuntu-Maschine gemacht. Das dabei erzeugte Binärfile kann direkt auf der erzeugenden Maschine ausgeführt werden. Es ist aber nicht einfach so auf eine andere Maschine zu portieren, es muß „deployed“ werden. Das ist vermutlich nicht sonderlich kompliziert, aber es ist mir bisher nicht gelungen. Ich bin kein Linux-Spezialist.
Hinweise
Im „richtigen Leben“ kann die Magnitude nicht größer als 1 sein. In gewissen Grenzen wird das in diesem Programm aber toleriert, weil bei der Zahleneingabe schonmal ein ungültiger Zwischenwert vorkommen kann. Die gezeigten Rechenergebnisse sind dann aber ungültig. Das wird dadurch angezeigt, daß die Verbindungslinie im Gamma-Diagramm dann rot angezeigt wird.
Außerdem kommt es zu Divisionsfehlern, wenn ein Widerstand von 0 Ω oder ein Leitwert von 0 S eingegeben wird, weil bei der Berechnung des Kehrwerts dann durch Null dividiert wird. In den Anzeigefeldern erscheint dann „NaN“ (not a number) oder „infinite“ (unendlich). Die Schieberegler lassen sich daher absichtlich nicht bis auf 0 verschieben.
Fehlerberichte oder Änderungswünsche nehme ich gerne entgegen…
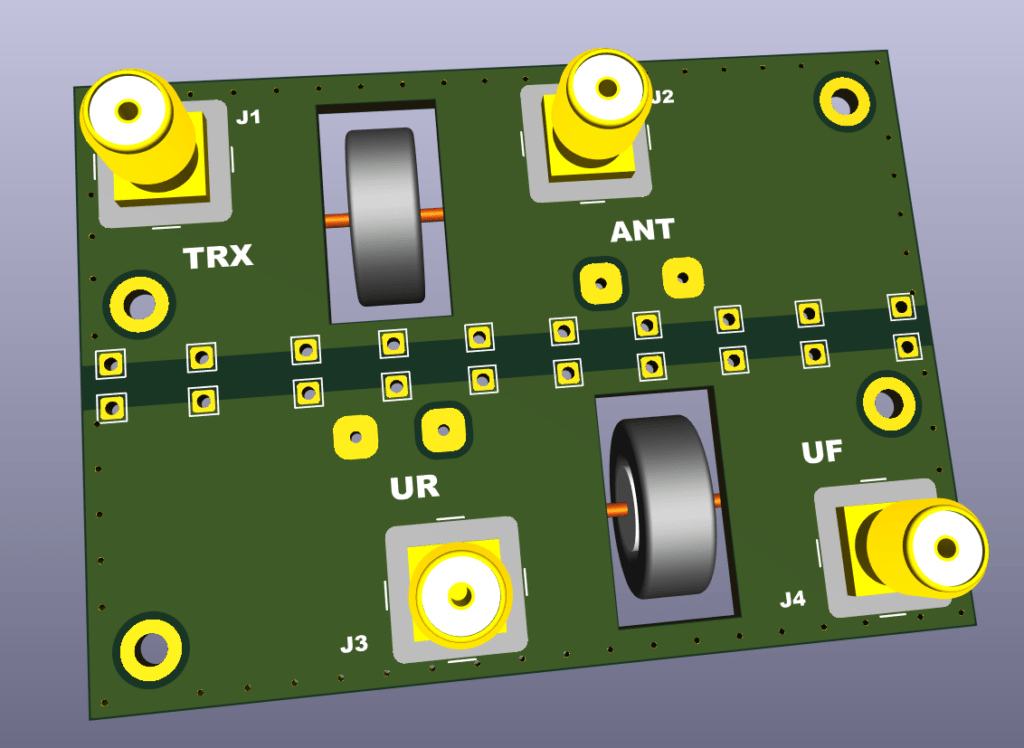
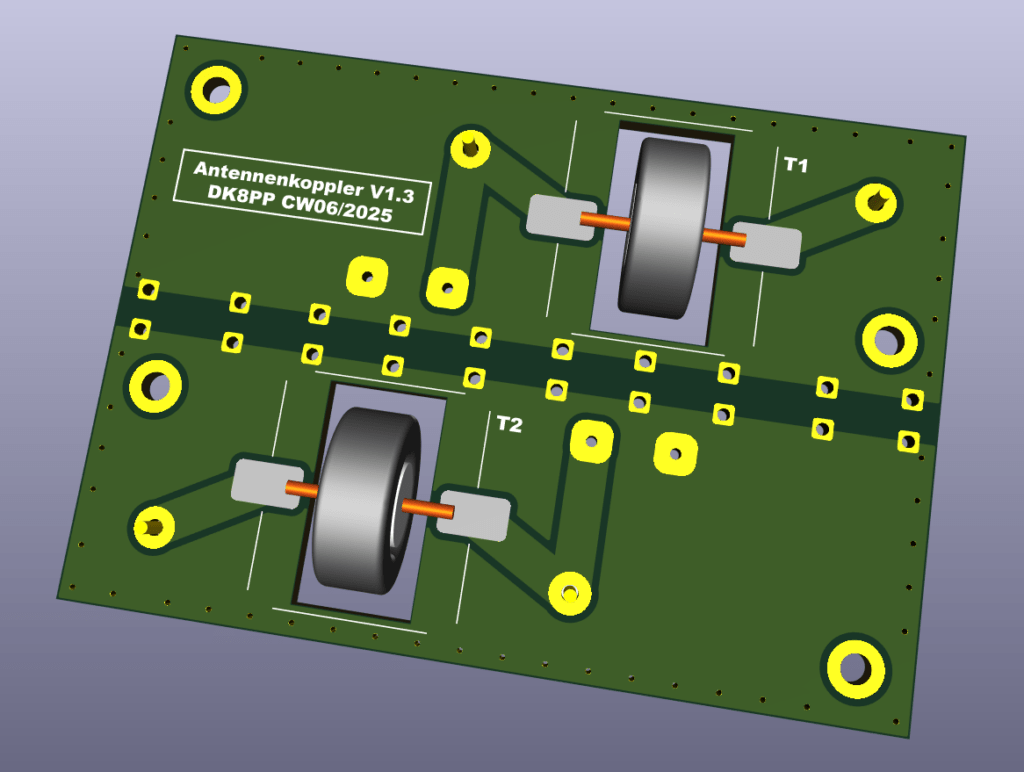
In dem Beitrag „Praktischer Aufbau eines Richtkopplers“ hatte ich schonmal einen allerersten Prototypen auf einer gefrästen Leiterplatte aufgebaut und ausgemessen. Das Ergebnis war durchaus besser als erwartet, den Prototypen hätte man schon einsetzen können. Zwischenzeitlich habe ich einen weiteren Prototypen mit kleinen Verbesserungen gebaut und jetzt ist es an der Zeit, eine passende Leiterplatte fertigen zu lassen. Die Schaltung ist unverändert, aber die Leiterplatte wurde etwas angepasst. Hier der Schaltplan und die 3D-Ansichten:
Anders als beim ersten Prototypen sind die beiden Masseflächen nicht miteinander verbunden. Der Transceiver und die Antenne sind also gegenüber der Auswertung potentialgetrennt. Zwischen beiden Funktionsblöcken lässt sich eine Trennwand zur besseren Abschirmung der beiden Transformatoren gegeneinander einlöten. Zur Aufrechterhaltung der Potentialtrennung kann das eine doppelseitige Leiterplatte sein. Wenn die Potentialtrennung nicht gewünscht ist oder auch nicht funktioniert, dann kann auch ein Weißblechstreifen eingelötet werden. Ob die Abschirmung tatsächlich wie erhofft die Isolation verbessert, muß dann die praktische Messung zeigen.
Auch hier sind wieder SMA-Buchsen für den Anschluß vorgesehen. Das erleichtert die Messungen mit dem Netzwerkanalysator. Für die Meßports UR und UF kann dann auch ein gewinkelter SMA-Stecker eingelötet werden, womit dieser Koppler direkt an das noch zu bauende Gamma-Messgerät angeschlossen werden kann. Der vorgesehene Abstand von 30 mm wurde schon berücksichtigt.
Das Wickeln der Ringkernspulen
Beim korrekten Bewickeln der Toroide kann man leicht ins Schwimmen kommen, aber es ist im Grunde ganz einfach, man muß sich nur an den Schaltplan halten. Der erfordert für beide Transformatoren, daß Pin 4 gegenüber von Pin 1 und Pin 3 gegenüber von Pin 2 liegt. Bei beiden Trafos besteht die Wicklung zwischen Pins 1 und 2 aus nur einer einzigen Windung. Die Hälfte dieser Windung ist der Draht, der durch den Ringkern gesteckt wird (beispielsweise ein Stück Koaxkabel) und die zweite Hälfte besteht aus der Massefläche der Leiterplatte, die den Ausschnitt für den Ringkern umschließt.
Wie üblich soll die vom Transceiver angesteuerte Wicklung als Primärwicklung bezeichnet werden, die andere als Sekundärwicklung. Damit haben die Primärwicklung von T1 und die Sekundärwicklung von T2 jeweils eine Windung.
Die zweite Trafowicklung wird jeweils auf den Ringkern gewickelt. Sie hat mehrere Windungen, typischerweise etwa 30. Entscheidend für die richtige Polung dieser Wicklung ist der Wickelsinn, ob man also linksherum oder rechtsherum wickelt. Ob man nach oben oder nach unten wickelt, ist unerheblich. Man könnte sogar, wenn es mechanisch passen würde, auf der Stelle wickeln, also alle Windungen übereinander. Oder hin und her.
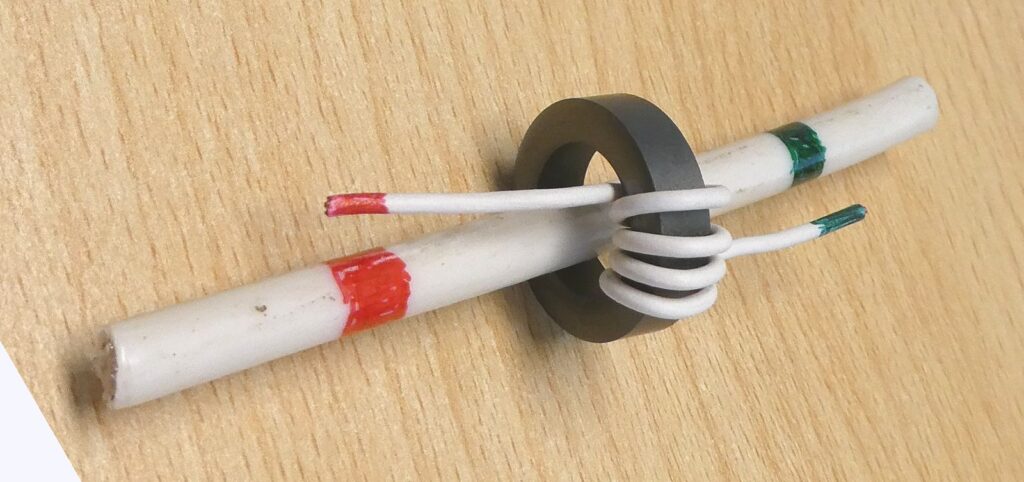
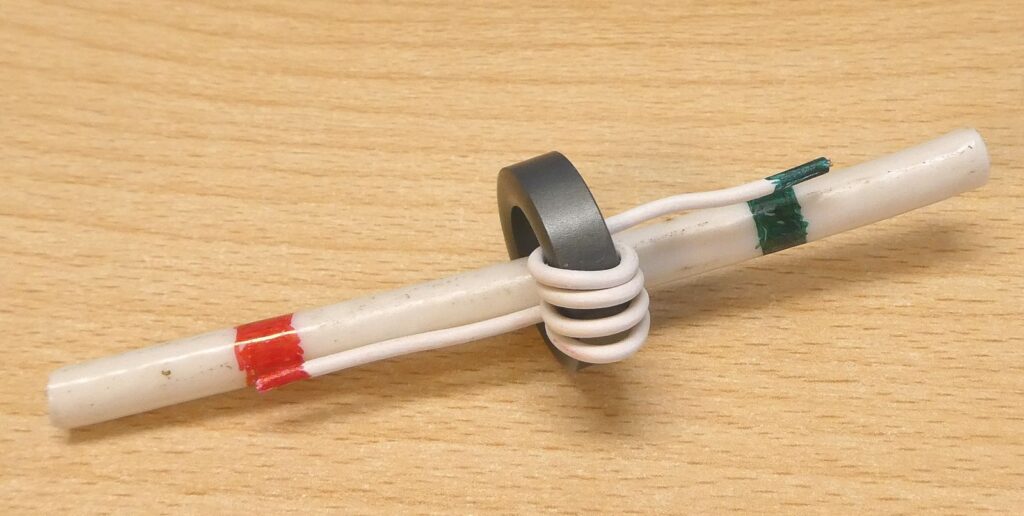
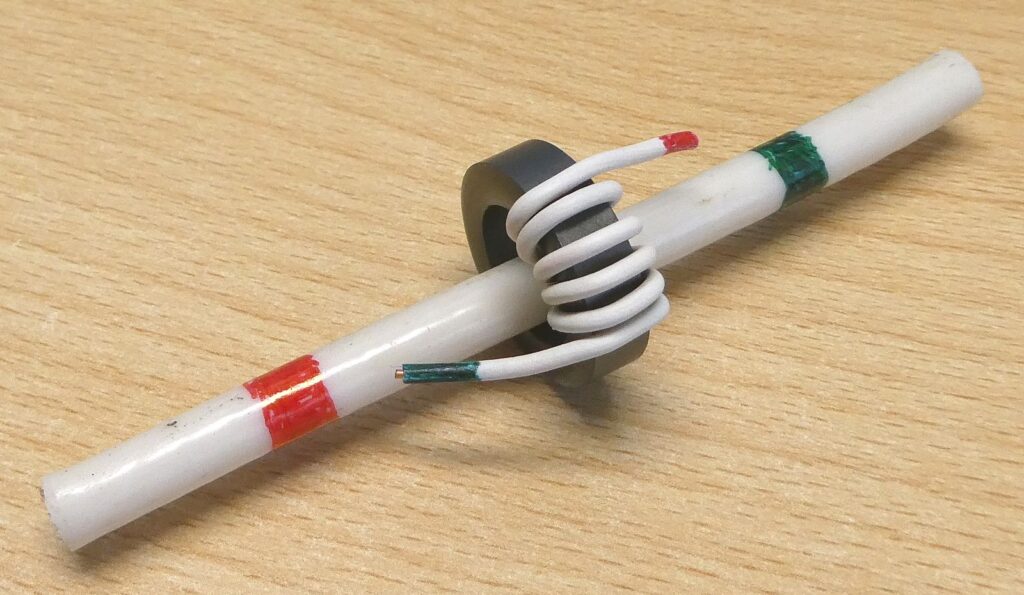
Wie erkennt man nun, welcher Wickelsinn nötig ist? Ganz einfach, er ist von der ersten Wicklung, der mit nur einer Windung, vorgegeben. Diese Wicklung geht durch den Ringkern hindurch, also muß auch die zweite Wicklung durch ihn hindurch starten. Wenn alle Windungen aufgebracht sind, hat man zwei Wicklungsenden, die aus dem inneren Zylinder des Toroids herausragen. Das Signal auf jedem dieser Enden hat dieselbe Phasenlage wie das auf der ersten Wicklung an derselben Seite. Das ist auf den nachfolgenden Fotos veranschaulicht:
Korrekte Polung, nach unten gewickeltKorrekte Polung, nach oben gewickeltfalsche Polung
Die beiden linken Fotos zeigen farblich gekennzeichnet die korrekte Polung mit dem Start der Wicklung durch den Kern. Die Wickelrichtung, also ob man nach oben oder nach unten weiterwickelt, ist gleichgültig. Das rechte Bild zeigt die falsche Polung durch den Start der Wicklung an der Außenseite. Auch hier ist es gleichgültig, ob man nach oben oder unten wickelt.
Die oben gezeigte Leiterplatte ist so entworfen, daß sich die Pins 1 und 4 sowie 2 und 3 direkt gegenüberliegen. Damit können die Drähte der Wicklung direkt so angeschlossen werden, wie sie aus dem Ringkern kommen, ohne sie zu kreuzen.
Wickeldraht
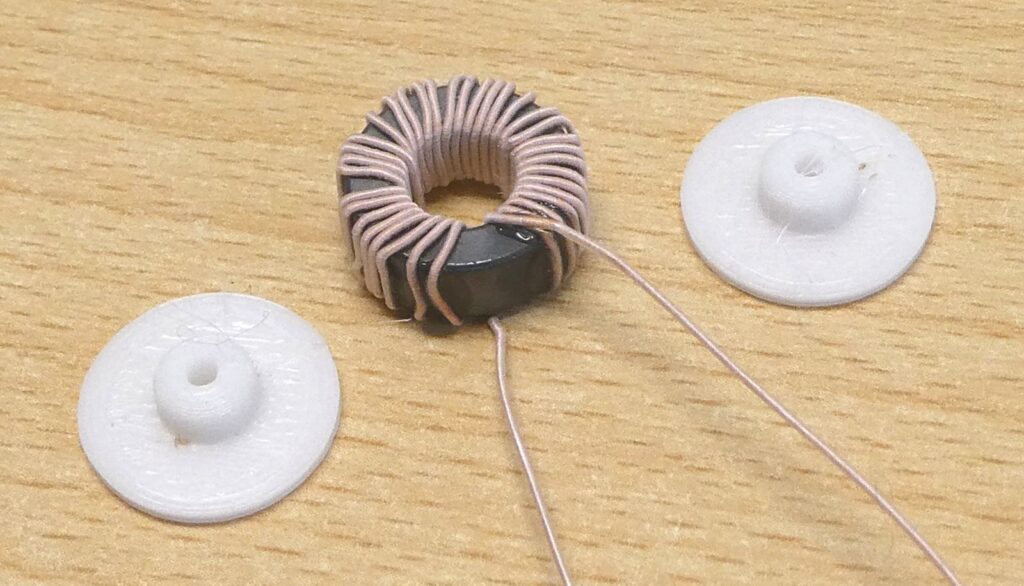
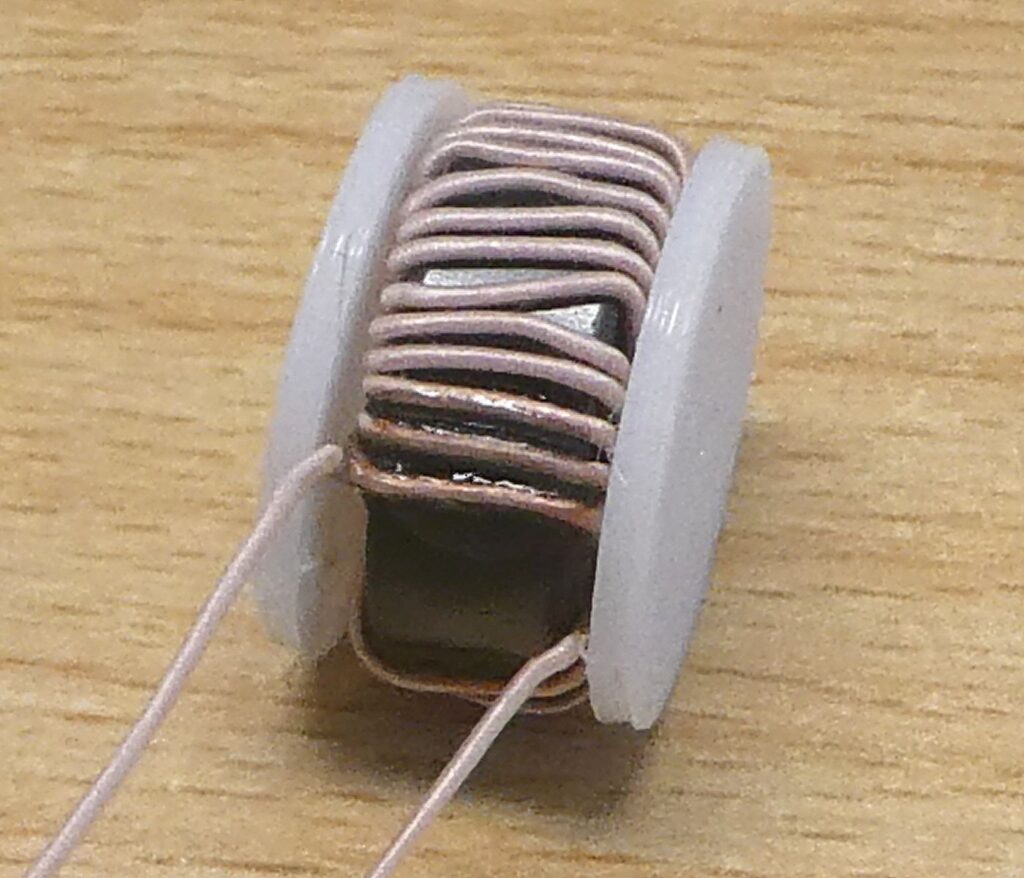
Üblicherweise wird lackierter Kupferdraht (CuL) auf den Ringkern gewickelt. Das sieht oft nicht besonders schön aus, weil man den Draht nur schwer glattgezogen bekommt. Ich habe es daher mal mit HF-Litze probiert, die wesentlich geschmeidiger ist. Ich habe eine 55m-Rolle gekauft, die aus 105 einzelnen Kupferadern besteht, von denen jede einen Durchmesser von 32µm hat. Das ergibt einen Außendurchmesser von 0,46 mm und es entspricht einem CuL-Draht von etwas über 0,3 mm Durchmesser. Die Durchschlagsfestigkeit wurde mit mindestens 500 V angegeben. Tatsächlich lässt sich die HF-Litze sehr schön verarbeiten, aber ich muß zugeben, daß es auch nicht viel schöner aussieht, als mit CuL-Draht. Einen Vorteil hat es vermutlich nicht.
Mit HF-Litze bewickelter FT50-43 Ringkern.Ringkern mit seitlichen Deckeln aus dem 3D-Drucker.Ringkern mit aufgesetzten seitlichen Deckeln.
Anfang und Ende der Wicklung sind jeweils mit einem winzigen Tröpfchen Sekundenkleber fixiert. Es wurde darauf geachtet, daß zwischen der ersten und letzten Windung ein etwas erhöhter Abstand bleibt, denn dort ist die anliegende Spannung am höchsten. Das ist bei 100 Watt Sendeleistung nicht wirklich wichtig, denn die Spitzenspannung liegt da bei „nur“ 200 V und die Isolation der Litze soll 500 V aushalten. Das sollte für über 600 Watt reichen, aber das muß man ja nicht ausreizen.
Induktivität und Selbstresonanz
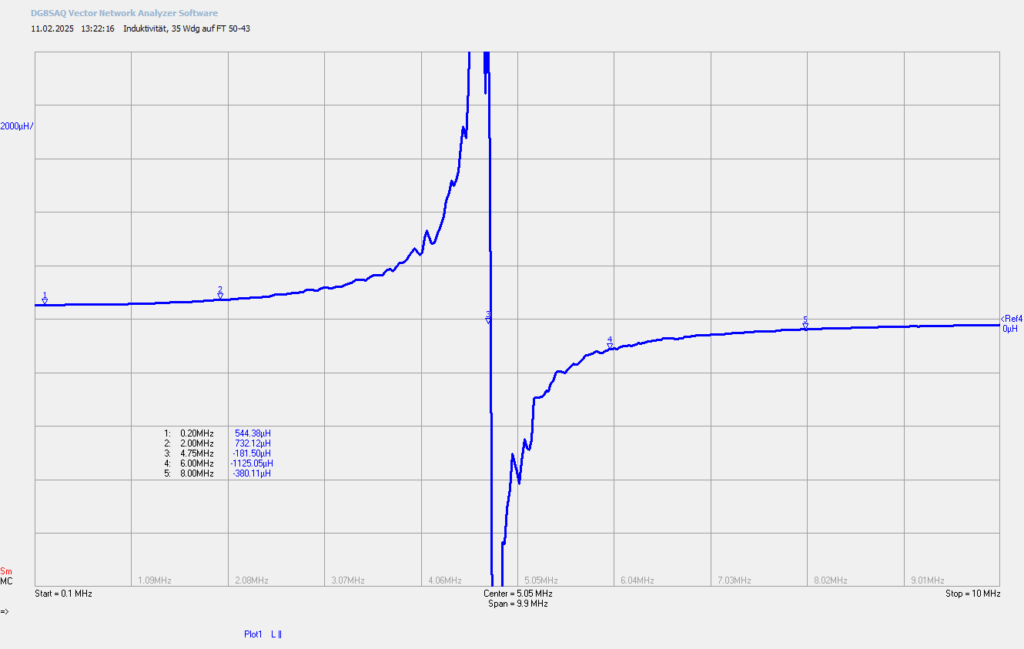
Der hier verwendete Amidon-Ringkern FT 50–43 ist mit einem AL-Wert von 440 nH/Wdg² spezifiziert. Das lässt bei 35 Windungen eine Induktivität von 35×35×440 nH = 539 µH erwarten. Die Messung bestätigt das:
Impedanz der Ringkernspule, 35 Windungen auf FT 50–43
Bei niedrigen Frequenzen beträgt die Induktivität 544 µH, liegt also sehr nahe am errechneten Wert. Die zweite Spule lag etwas unter 500 µH. Sollte ich da etwa eine Windung zu wenig draufgewickelt haben? Nein, es bleiben nach mehrfachem nachzählen jeweils 35 Windungen. Ein Blick in das Datenblatt klärt die Diskrepanz: die Toleranz des AL-Wertes wird mit 25% spezifiziert. Da die Spule aber hier als Übertrager eingesetzt wird, ist ihre Windungszahl wichtig und die Induktivität ist von untergeordneter Bedeutung. Ihr Scheinwiderstand soll aber bei der niedrigsten Betriebsfrequenz so hoch sein, daß kein signifikanter Strom fließt. In diesem Fall liegt er für das 160-m-Band bei über 6 kΩ.
Was ist mit der Selbstresonanzfrequenz (SRF)? Die Messung zeigt, daß sie bei etwa 4,75 MHz liegt. Das lässt auf eine parallele parasitäre Kapazität von 2 pF schließen, die kaum zu unterbieten sein dürfte. Das muß uns in diesem Fall auch nicht weiter stören, denn die Spule ist nicht in einem Resonanzkreis verbaut, sondern in einem Übertrager, der zudem niederohmig mit 50 Ohm belastet ist. Die nachfolgenden Messungen zeigen, daß es im Bereich der SRF keine Auffälligkeiten gibt.
Messungen am fertigen Richtkoppler
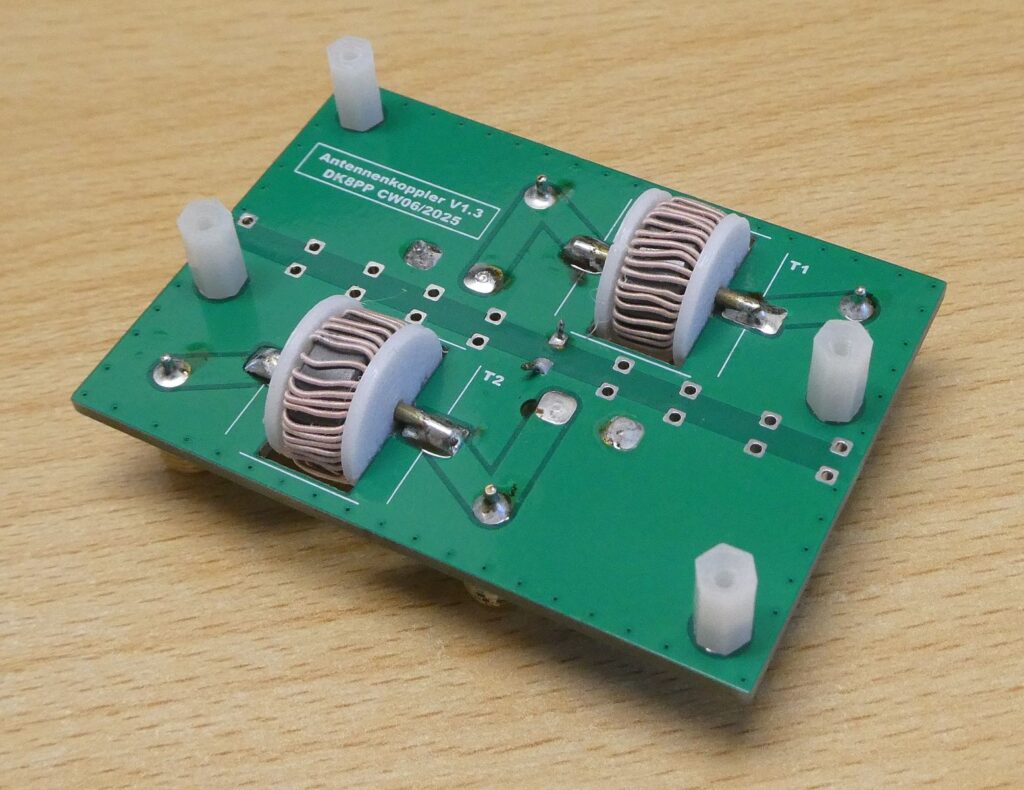
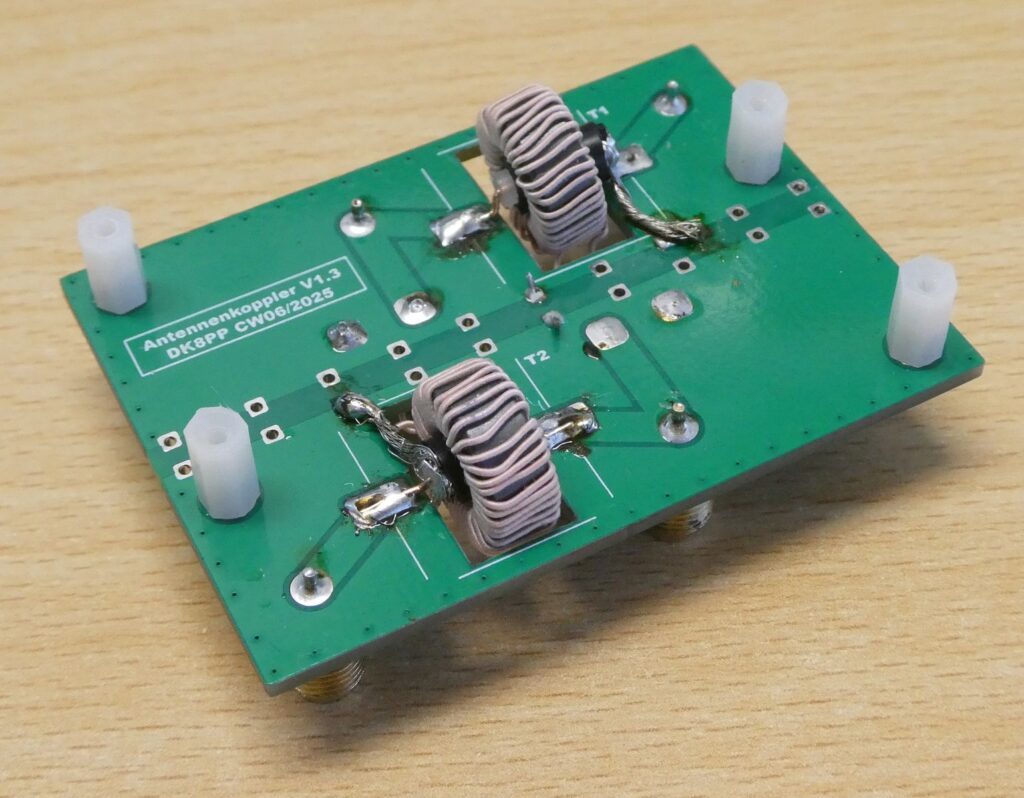
Fünf Leiterplatten sind schnell gefertigt: Sonntags die Fertigungsdaten nach China geschickt und schon am Freitag danach liegen die Leiterplatten im Briefkasten. Kosten für Fertigung, Versand und Einfuhrumsatzsteuer etwas unter 9 Euro. Immer noch unglaublich, die Chinesen lassen uns wirklich alt aussehen! Die Ringkerne sind ja bereits fertig gewickelt und warten auf den Einbau. Noch vor dem Mittagessen ist eine Leiterplatte bestückt:
Koppler V1.3, OberseiteKoppler V1.3, Unterseite
Nachfolgend sollen dieselben Messungen wie schon beim Prototypen durchgeführt werden. Alle Messungen starten bei 100 kHz, weil das unschöne Messergebnisse bei sehr niedrigen Frequenzen vermeidet. Die Messungen enden bei 150 MHz, weit jenseites des vorgesehenen Betriebsbereichs, der eigentlich nur bis 30 MHz geht, aber wenn möglich 50 und 70 MHz gerne noch mitnehmen darf.
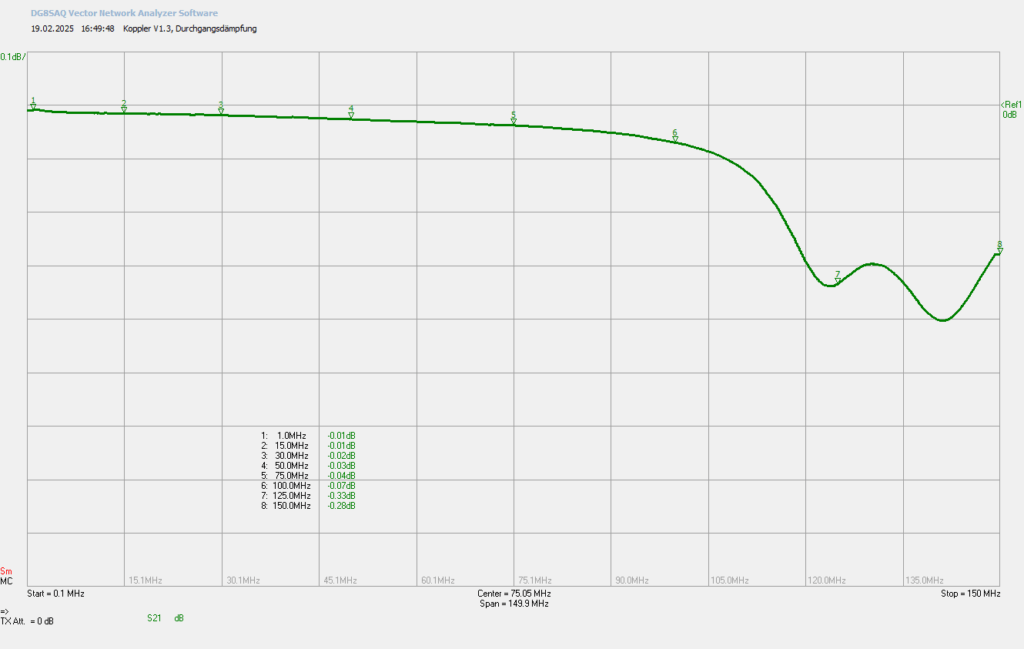
Durchgangsdämpfung
Koppler V1.3: Durchgangsdämpfung
Die Durchgangsdämpfung liegt wie erwartet im gesunden Bereich.
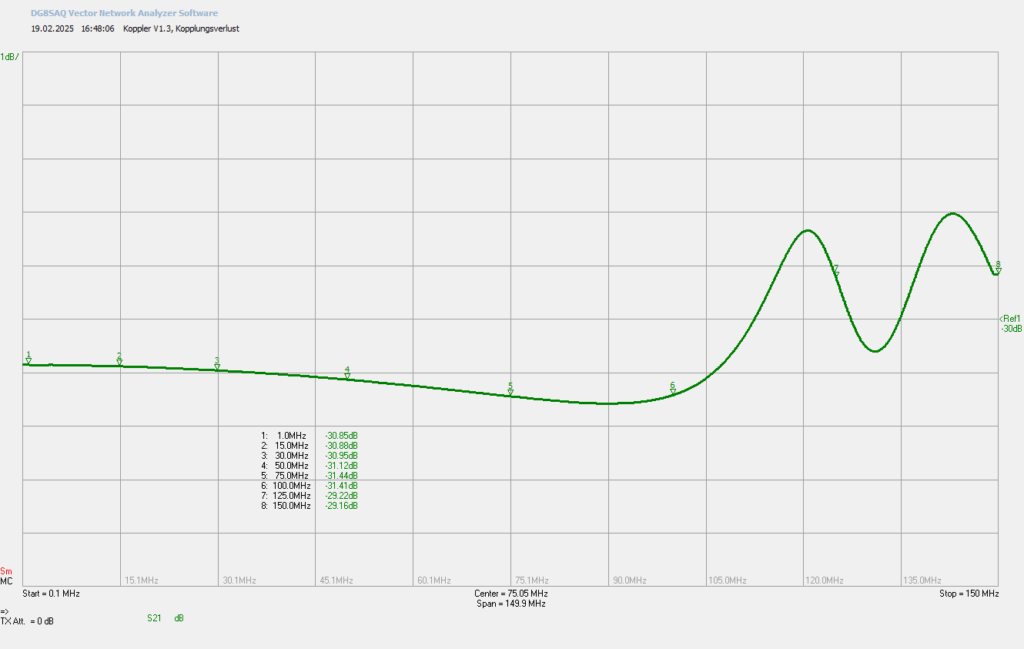
Kopplungsverlust
Koppler V1.3: Kopplungsverlust
Der zu erwartende Kopplungsverlust bei einem Übertragungsverhältnis von 1:35 liegt bei 10 * log(35²) = 30,9 dB. Die Messung bestätigt das für den Kurzwellenbereich im Rahmen der Meßgenauigkeit. Auch bei 100 MHz ist die Abweichung noch sehr gering. Man beachte den im Vergleich zu den ersten Messungen verzehnfachten vertikalen Zoomfaktor.
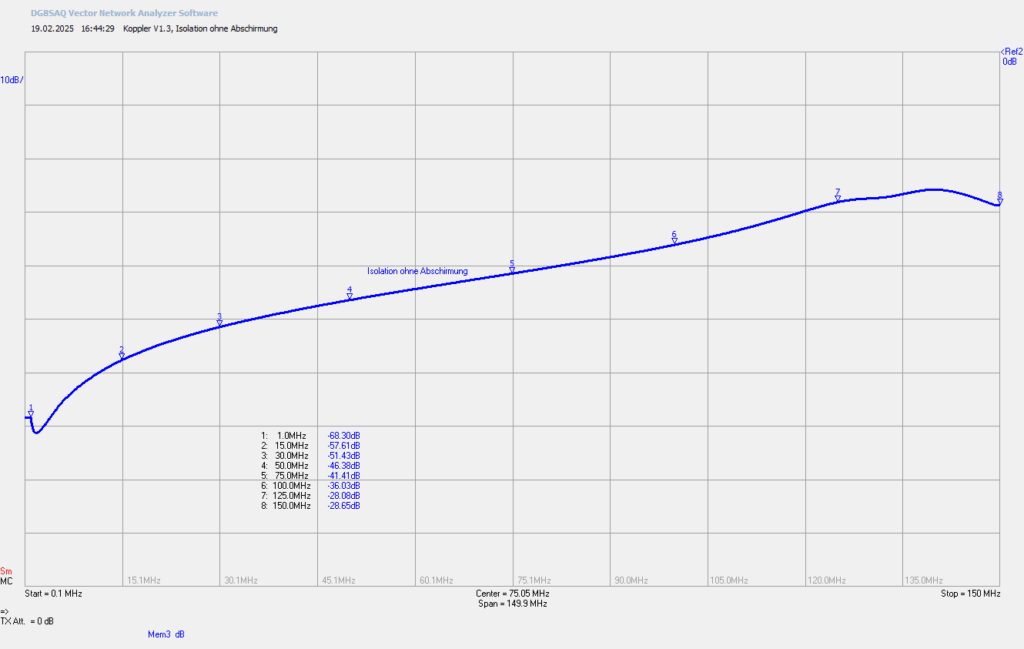
Isolation
Koppler V1.3: Isolation
Im Vergleich zum Prototypen ist die Isolation erschreckend schlecht. Bei 1 MHz ist der Unterschied nur gut 1 dB, bei 50 MHz aber schon 7 dB und bei etwas über 100 MHz ist die Isolation völlig dahin. Sie kommt an den Kopplungsverlust heran und damit ist keine Richtschärfe mehr vorhanden. Der Koppler ist für eine Messung bei diesen Frequenzen unbrauchbar.
Sollte es etwa doch einen Grund geben, warum man eine geerdete Abschirmung zwischen Primär- und Sekundärwicklung anbringen sollte? Nun, das Board ist schnell umgebaut:
Koppler V1.3, Unterseite, Ringkern mit Abschirmung
Das sieht jetzt nicht mehr so schön aus wie vorher, aber es ist ja nur ein Provisorium. Die Meßergebnisse sind erhellend, besonders wenn beide in einer Grafik gegenübergestellt werden:
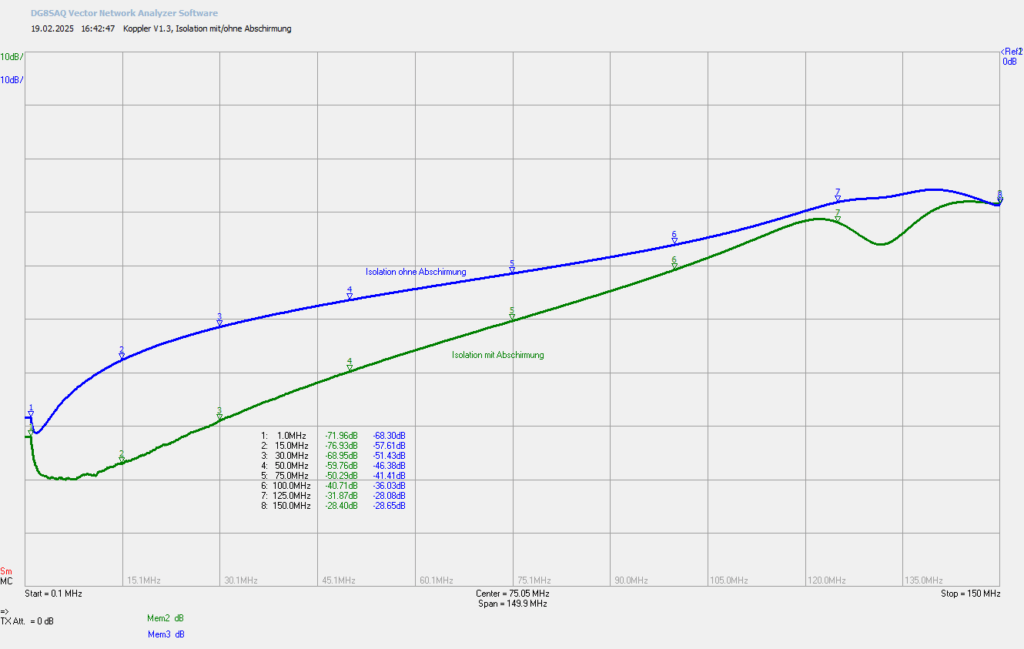
Koppler V1.3: Isolation mit und ohne Abschirmung
Die Isolation ist im unteren Frequenzbereich um fast 20 dB besser geworden. Die Erklärung ist simpel, da hätte ich auch gleich drauf kommen können: ohne Abschirmung koppelt die Primärseite kapazitiv auf die Sekundärseite, was sich besonders bei hohen Frequenzen sehr deutlich zeigt (und dort auch mit der Abschirmung nicht zu vermeiden ist).
Richtschärfe
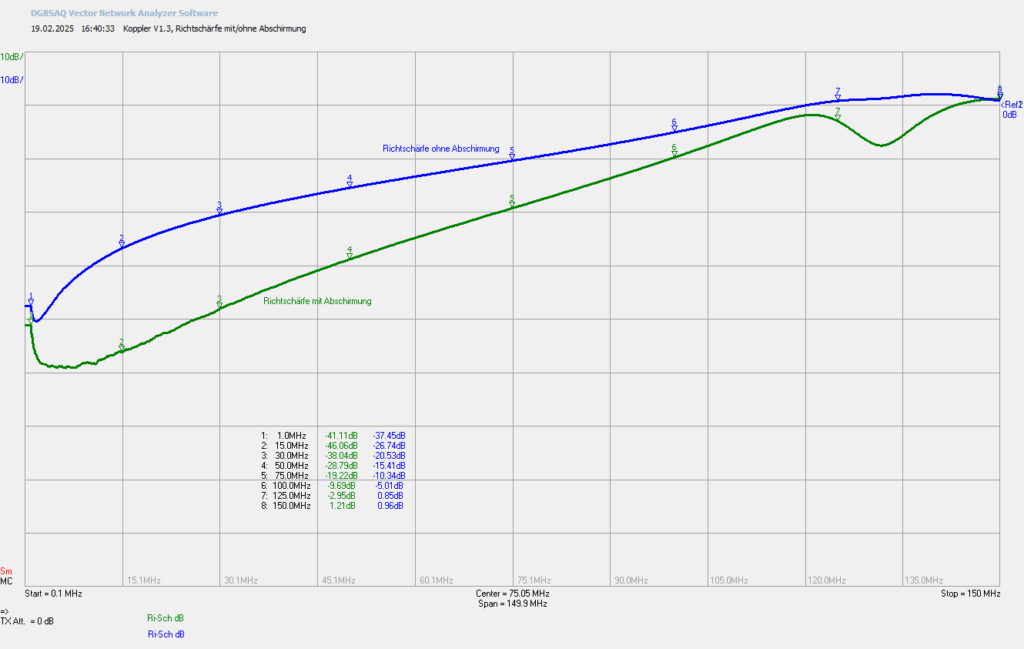
Auch die Richtschärfe soll hier für die abgeschirmte und unabgeschirmte Variante in einer einzigen Grafik gegenübergestellt werden. Sie ist das Verhältnis der reflektierten Spannung zur vorlaufenden Spannung und daher direkt ein Abbild der Isolation:
Koppler V1.3: Richtschärfe mit und ohne Abschirmung
Nehmen wir 20 dB Richtschärfe als absolutes Minimum an, unterhalb dessen keine vernünftige Messung mehr möglich ist, dann funktioniert die nicht abgeschirmte Variante gerade so im Kurzwellenbereich, während die abgeschirmte Variante bis ins 4‑m-Band verwendbar ist.
Erkenntnis
Eine Abschirmung zwischen Primär- und Sekundärwicklung ist unabdingbar. Selbst die „hingebastelte“ Version bringt bei niedrigen Frequenzen fast 20 dB Gewinn an Isolation und Richtschärfe. Es lohnt sich offensichtlich, hier noch mehr Aufwand hineinzustecken. Es sieht nach einem angepassten neuen Design aus, aber erst einmal soll diese Variante bis 100 Watt getestet werden.
Erster Probebetrieb
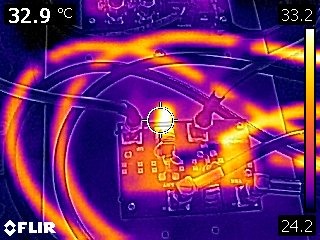
Diesen Richtkoppler habe ich nun zusammen mit der Auswerteschaltung in ein provisorisches (recyceltes) wetterfestes Gehäuse geschraubt und zunächst mal mit 100 Watt an einer Dummyload betrieben. Nach fünf Minuten Betrieb hält sich die Aufwärmung in engen Grenzen:
Infrarotaufnahme des Kopplers nach fünf Minuten Betrieb mit 100 Watt
T2 zeigt eine Temperaturerhöhung um etwa 10°C gegenüber der Umgebungstemperatur. Das liegt in derselben Größenordnung wie die verwendeten Koaxkabel. Die Kamera macht zwei Fotos, eines im infraroten und das andere im sichtbaren Bereich. Leider sind beide nicht deckungsgleich.
Inzwischen ist der Prototyp zu Testzwecken am Antennenmast montiert und zwischen die Zuleitung und den Antennentuner eingeschleift.
Antennenkoppler und Auswertung im Testbetrieb
Erste Tests sind ermutigend, weitere Tests werden ein paar Tage in Anspruch nehmen. Die bisher provisorische Auswertesoftware bedarf aber einer grundlegenden Überarbeitung, was sicher ein paar Wochen dauern wird. Ich werde berichten…
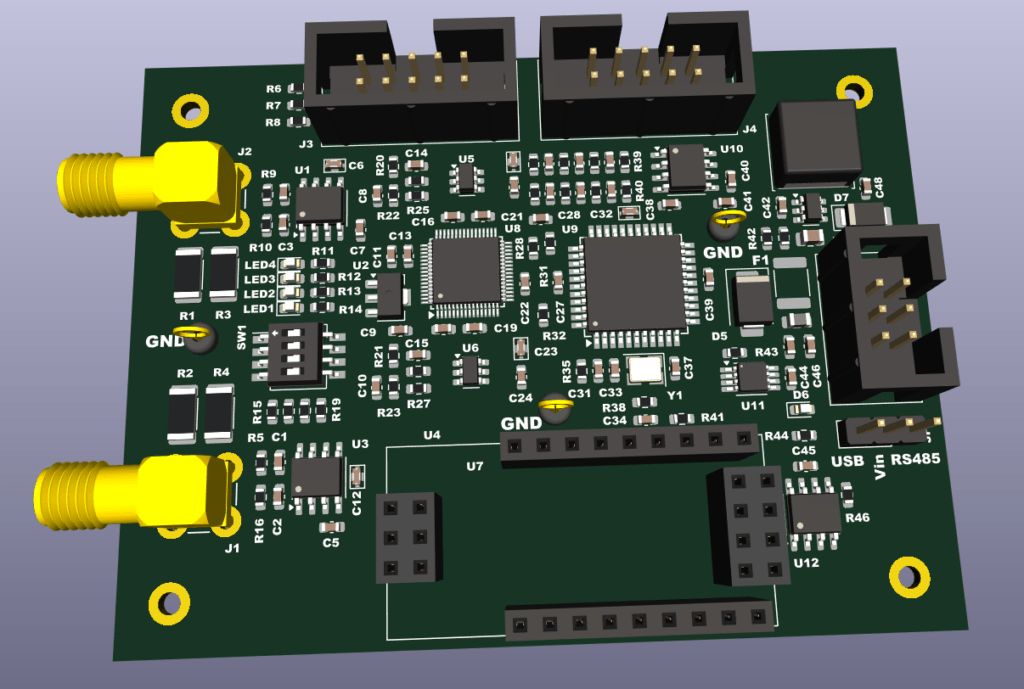
Nachdem ich in der vorherigen Artikelserie zur Messung des komplexen Reflexionsfaktors (Teil 1, 2, 3) ein allererstes Testboard („PoC“) zum Prüfen der Idee vorgestellt habe, steht nun ein Entwurf für den ersten echten Prototypen zur Verfügung. Hier der Schaltplan und die 3D-Ansicht:
Die Funktionsweise ist weitgehend gleichgeblieben, aber der Mikrocontroller ist nun auf dem Board untergebracht und es wird daher kein separates CPU-Board mehr benötigt. Das CPLD wurde durch einen moderneren Typ ersetzt, ein 5M160Z im platzsparenden 64-Pin EQFP-Gehäuse mit 0,4 mm Pinabstand. Diese Generation verträgt keine 5‑V-Versorgungsspannung mehr und daher wurde das gesamte Design auf 3.3 V Versorgung geändert. Auch hier wurde wieder der bewährte Simple Switcher LMR16006X von TI eingesetzt, der mit bis zu 60 V Eingangsspannung umgehen kann. Zum Schutz vor überhohen Spannungen ist im Eingang allerdings eine Schutzdiode SMBJ36A verbaut, die die nominale Betriebsspannung auf 36 V DC begrenzt. Auch die Kondensatoren sind nur bis 50 V spezifiziert, da empfiehlt es sich, etwas Sicherheitsabstand zu halten. Bekanntlich nimmt ja auch die Kapazität von Keramikkondensatoren bei steigender Betriebsspannung erheblich ab.
Das CPLD
Das CPLD benötigt 1.8 V als Betriebsspannung für den Kern. Die wird mit einem Linearregler aus den 3.3 V erzeugt. Da die Stromaufnahme gering ist, hält sich die Verlustleistung in Grenzen. Die 3.3‑V-Versorgung ist für einen Maximalstrom von 500 mA ausgelegt.
Das Interface zum CPLD wurde etwas angepasst. Da es sehr viel mehr Pins zur Verfügung stellt als benötigt werden, wurden jeweils vier Pins für einen DIP-Schalter und für LEDs vorgesehen. Sie werden von der CPU über eine synchrone serielle Schnittstelle gelesen und geschrieben, genauso wie der Frequenzzähler. Das Design steht noch aus. Am einfachsten dürfte klassisches Bit-banging sein, aber vielleicht geht auch was mit der IIC-Schnittstelle, an der auch der Temperatursensor hängt. Ich werde noch etwas herumspielen. Das Design aus dem PoC-Board habe ich testweise von dem 16-bit- auf einen 20-bit-Zähler erweitert. Damit werden 46 der 160 LEs belegt, es bleibt also genug Platz für weitere Spielereien.
Messung der Phasenverschiebung
Zur Messung der Phasenverschiebung sind jetzt zwei Tiefpässe implementiert, einer für voreilende und der andere für nacheilende Rücklaufspannung. Das vermeidet ein hochfrequentes Digitalsignal an einem Porteingang der CPU, benötigt dafür aber zwei Analogeingänge.
Digitalwandlung der Taktsignale
Die Digitalwandlung der Taktsignale hatte sich bereits im PoC-Board bewährt und wurde beibehalten. Zur möglichst guten Entkopplung der Spannungsversorgungen wurden hier wieder EMI-Filter von Murata eingesetzt. Als passend und gut verfügbar wurde der Typ NFM18PS105R ausgewählt.
Die Logarithmischen Verstärker
Auch hier wurden keine grundlegenden Änderungen vorgenommen. Die ohnehin optionalen Widerstandsnetzwerke an den Ausgängen wurde entfernt.
Als Terminierungswiderstände an den Porteingängen wurden jeweils zwei parallele 105‑Ω‑Widerstände eingebaut, die den Eingangswiderstand zusammen mit den anderen Lasten auf ziemlich genau 50 Ω terminieren sollten. Jeder dieser Widerstände hat eine 2010er Bauform und verträgt eine Verlustleistung von 500 mW, zusammen also 1 Watt. Ein Koppler mit einer nominalen 30-dB-Koppeldämpfung könnte dann also mit bis zu 1 kW Leistung betrieben werden.
Schnittstellen
In meinen Außengeräten verwende ich seit jeher die RS485-Schnittstelle. Damit kann man zuverlässig mehrere hundert Meter überbrücken und Kopplungen des Sendesignals von in meinem Fall immerhin 100 Watt waren nie ein Problem, obwohl alle Kabel im selben Kanal liegen.
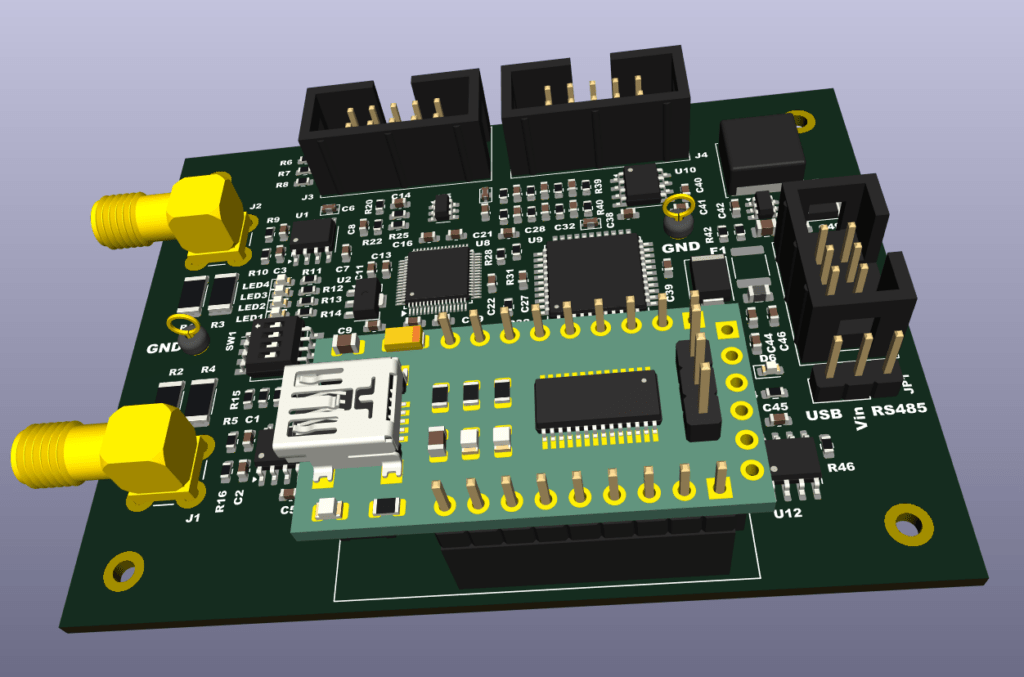
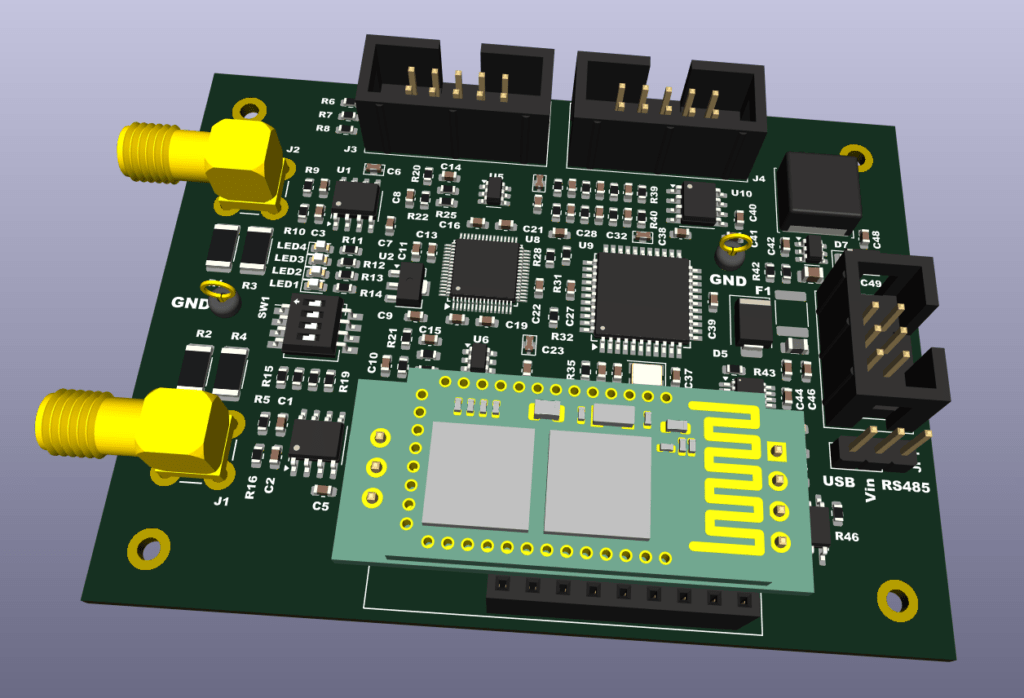
Um eine Verwendung des Kopplers im Innenbereich, z.B. direkt an der Station, nicht unnötig zu erschweren, habe ich für diesen Prototypen die optionale Verwendung einer USB-Schnittstelle und eines Bluetooth-Adapters vorgesehen. Sie können alternativ im unteren Bereich aufgesteckt werden.
Prototyp mit aufgesteckter USB-Schnittstelle (vorläufig)Prototyp mit aufgesteckter Bluetooth-Schnittstelle (vorläufig)
Bei aufgesteckter USB-Schnittstelle kann das Board auch über USB versorgt werden.
Status und Fertigung
Das Projekt ist momentan genausoweit fortgeschritten, wie hier beschrieben. Der Schaltplan ist mehr oder weniger fertig und die Komponenten sind provisorisch platziert. Geroutet ist noch nichts, kleine Änderungen sind noch möglich, nötigenfalls auch große.
Der Prototyp ist so entworfen, daß er bei JLCPCB auf einer preisgünstigen 4‑lagigen Platine gefertigt werden kann. Das Handlöten von 0.4‑mm-pin-pitch Gehäusen muß ich mir dann nicht antun. Als Baugrößen für das Vogelfutter habe ich meist 0603 gewählt, weil diese Komponenten notfalls noch von Hand ersetzt werden können. 0402 wäre auch möglich, bringt aber auch nicht mehr soviel mehr Platzgewinn.
Die Kostenvorschau zeigt mir bei fünf Boards über 260 Euro an. Dazu kommt dann die Einfuhrumsatzsteuer und Versand, so daß ein Board fast 70 Euro kosten dürfte. Am teuersten sind übrigens die logarithmischen Verstärker, die pro Stück mit knapp 13 Euro zu Buche schlagen. Das CPLD kostet 5 Euro und der Mikrocontroller 3 Euro. Da sollte man vor der Bestellung nochmal gut nachdenken.
Die SMA-Buchsen und die Pfostensteckverbinder werde ich bei Bedarf von Hand anlöten. Die JTAG Schnittstellen werden bestenfalls nur einmal benötigt, nämlich um den Bootloader in die CPU und den Bitstream in das CPLD zu programmieren. Zumindest zu Bastelzwecken geht das vermutlich, ohne die Steckverbinder einzulöten.
Gesamtansicht
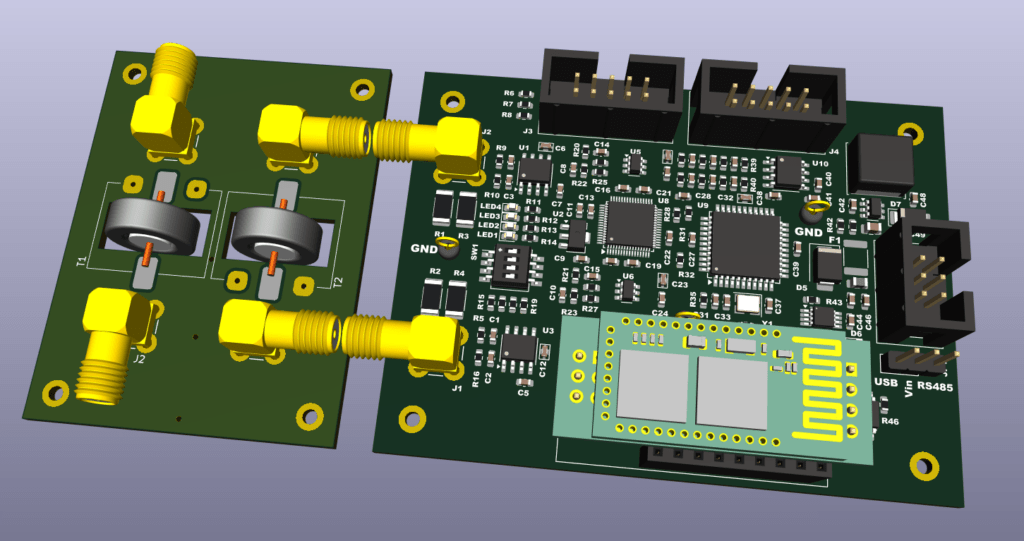
Abschließend noch eine Ansicht des Prototypen mit angeschlossenem Antennenkoppler:
Prototyp mit Koppler und aufgesteckter Bluetooth-Schnittstelle (vorläufig)
Am Antennenkoppler sollen natürlich SMA-Male Steckverbinder verbaut werden, die hier mangels 3D-Modell als SMA-Female gezeigt sind.
Es ist soweit: ich kann die ersten Meßergebnisse präsentieren. Die Auswertesoftware funktioniert soweit, daß man sie nutzen kann. Ich würde sie als Beta-Version bezeichnen, hier und da sind sicherlich noch Fehler vorhanden und Verbesserungsmöglichkeiten gibt es ja sowieso immer. Die Messungen wurden noch nicht mit einem Transceiver und echter Antenne gewonnen, sondern mit einem Signalgenerator SDG6022X von Siglent.
Die Auswertungssoftware
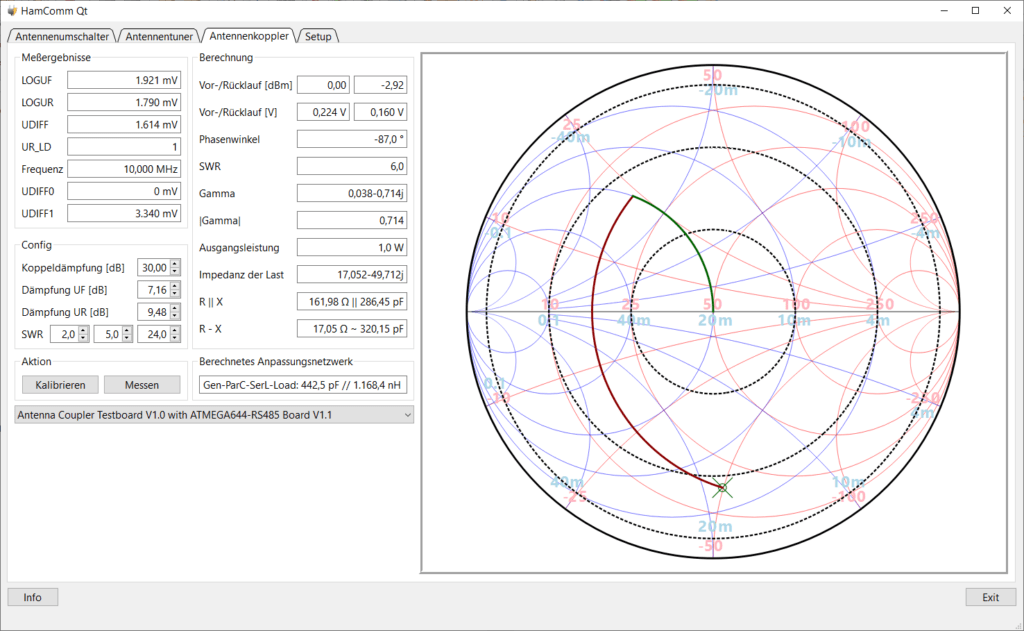
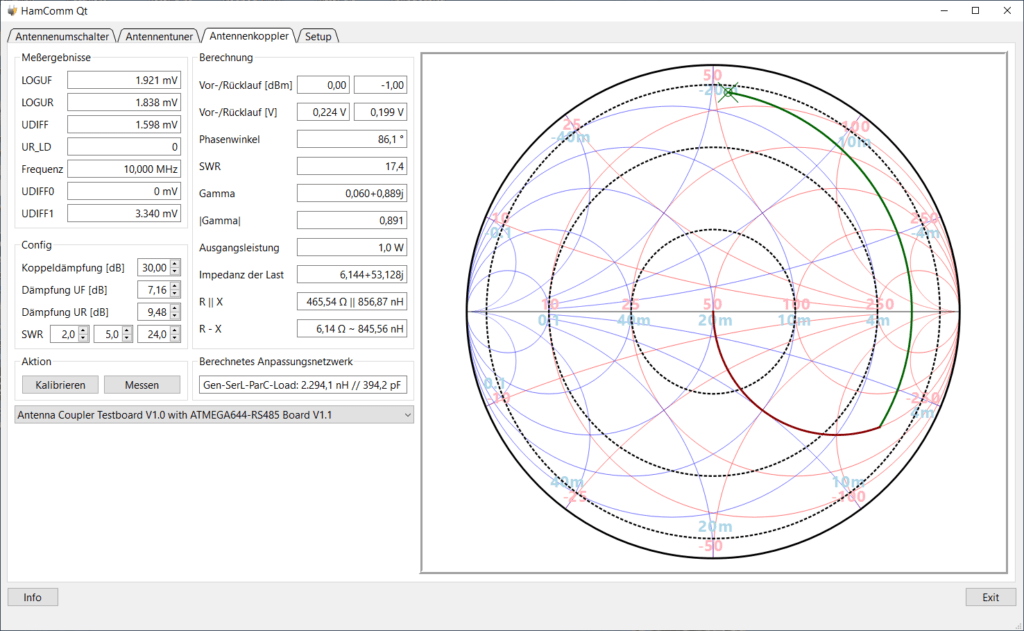
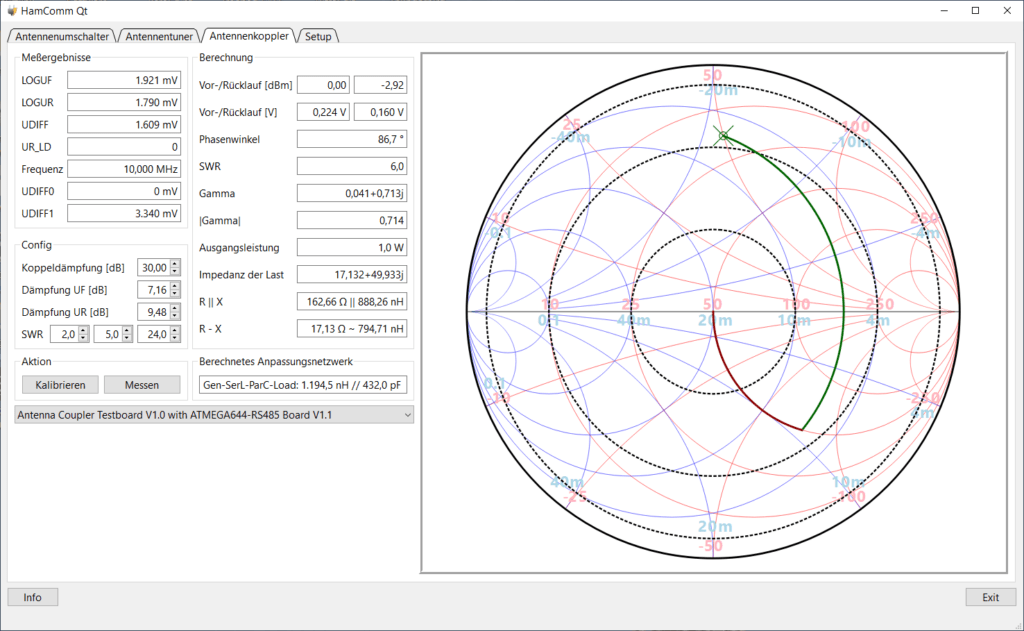
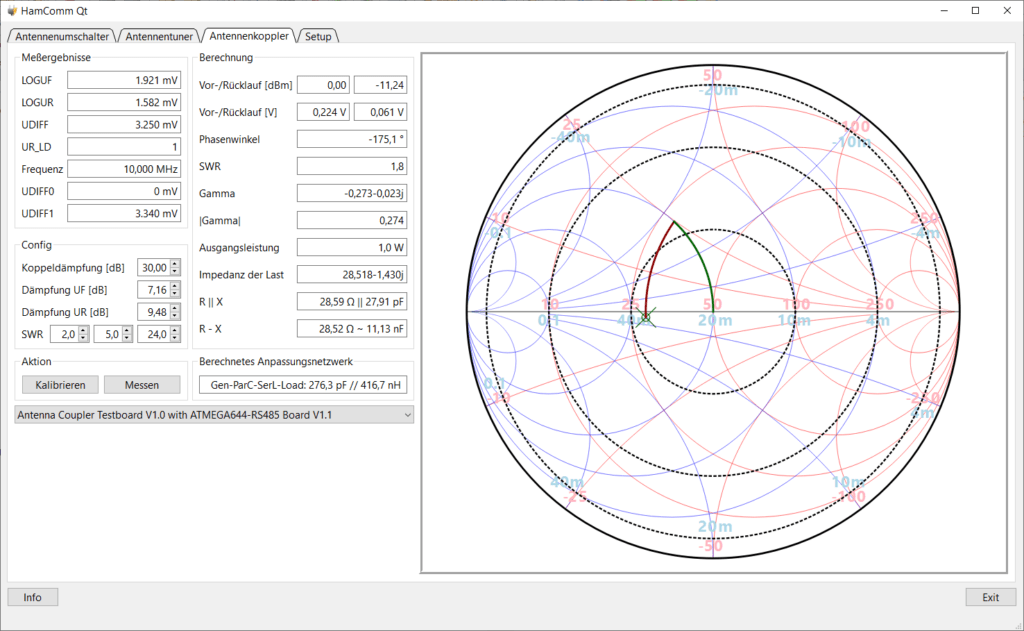
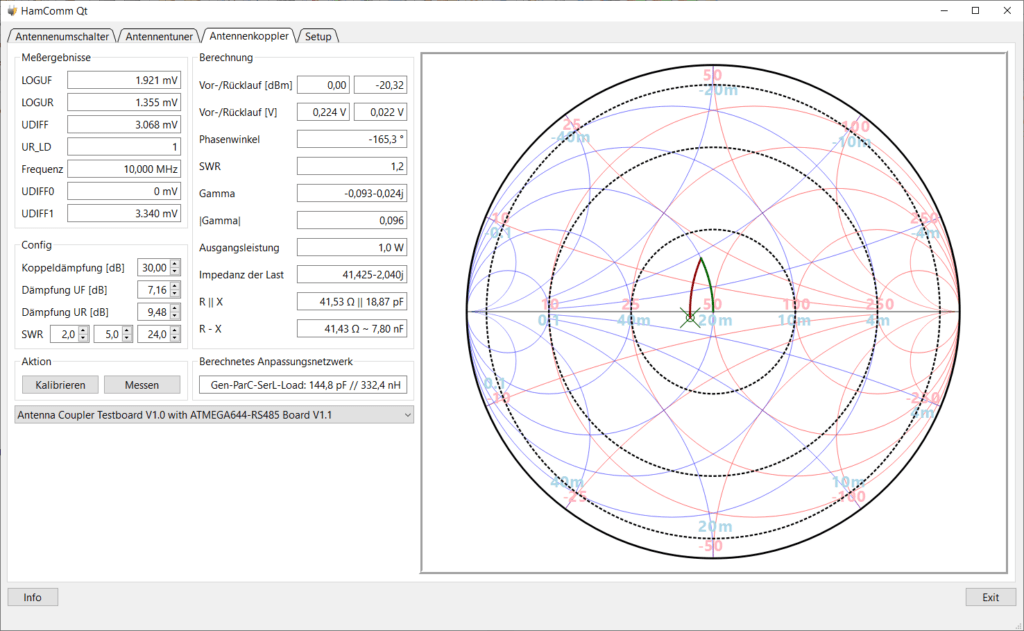
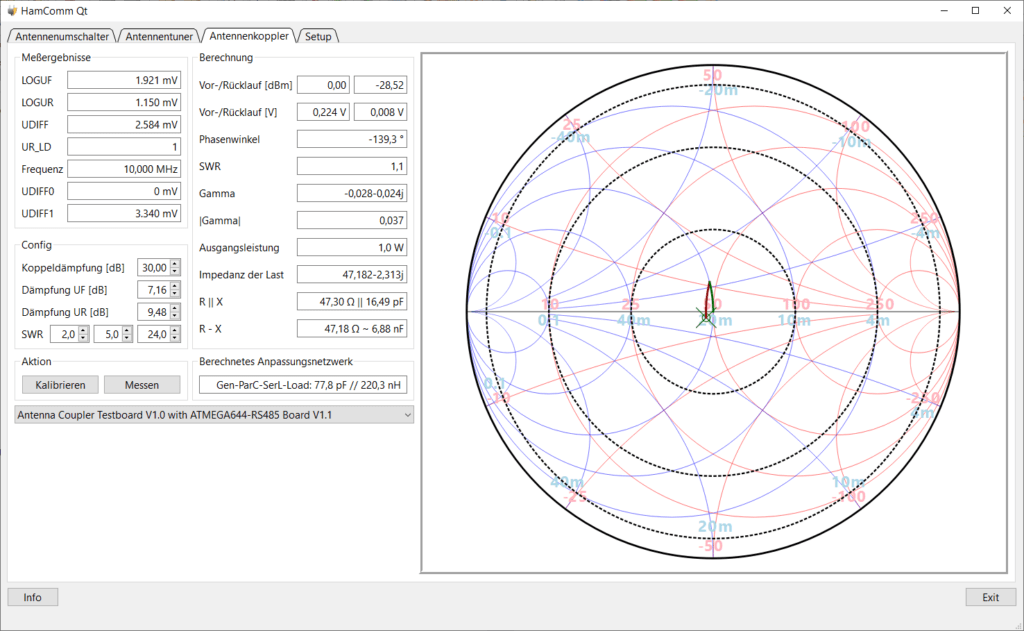
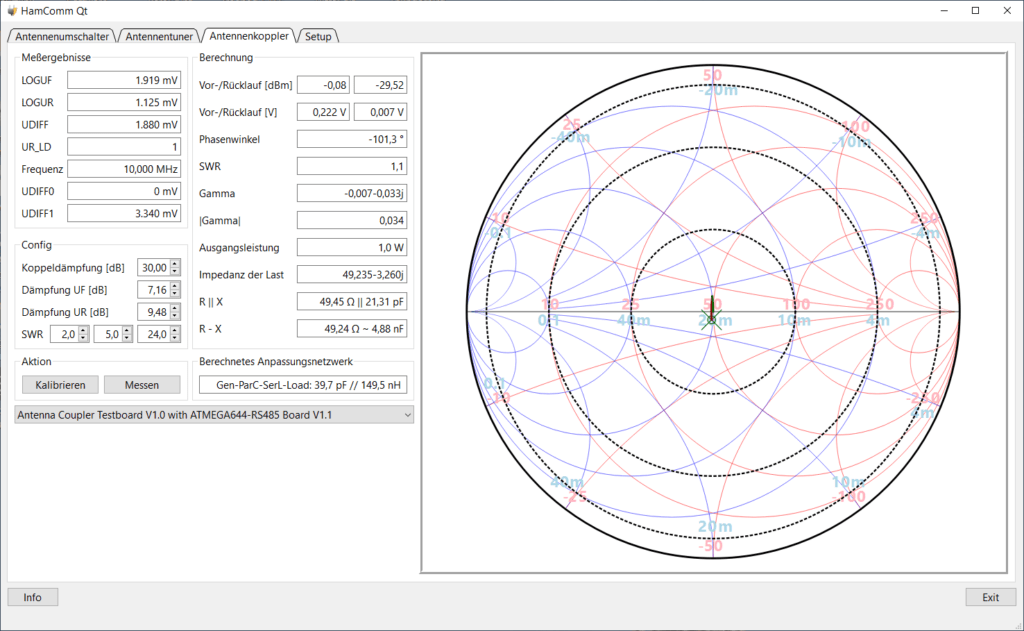
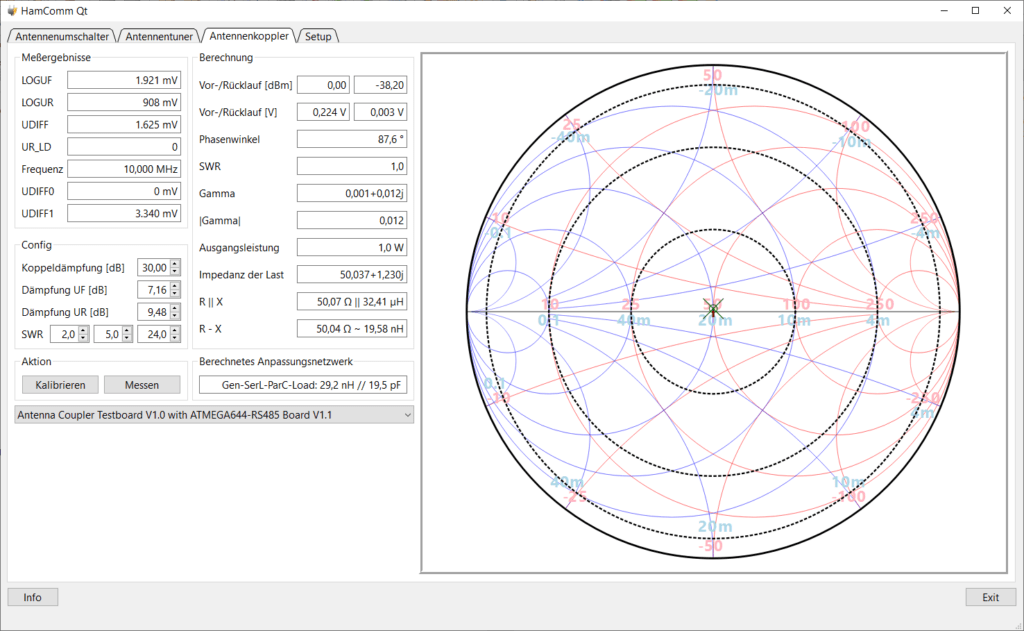
Hier zunächst exemplarisch ein Screenshot der Auswertesoftware:
Hier ist eine Messung mit einer Vorlaufleistung von 0 dBm und einer Rücklaufleistung von ‑3 dBm bei einer Frequenz von 10 MHz gezeigt. Die Bedeutung der einzelnen Felder wird nachfolgend beschrieben. Die verwendeten Signalnamen sind dieselben, die auch im Schaltplan verwendet wurden.
Meßergebnisse
In dieser Group Box werden die unverarbeiteten Meßergebnisse angezeigt, so wie sie vom Mikrocontroller erfasst wurden.
LOGUF und LOGUR
Das sind die vom Microcontroller gemessenen Vor- und Rücklaufspannungen LOGUF und LOGUR. Es sind die unveränderten Rohdaten, so wie sie aus den logarithmischen Verstärkern herauskommen.
UDIFF
UDIFF ist die Spannung, die die Phasendifferenz anzeigt. Es ist die aus dem Tiefpass herauskommende mittlere PWM Spannung. Auch dieser Meßwert ist unbearbeitet.
UR_LD
UR_LD ist 0 oder 1 und zeigt an, ob die rücklaufende Spannung der vorlaufenden Spannung voreilt oder hinterherhinkt.
Frequenz
Das ist die vom CPLD gemessene Frequenz der vorlaufenden Spannung UF. Die Frequenz ist naturgemäß die gleiche wie die der reflektierten Spannung UR, aber je besser die Anpassung wird, umso kleiner wird UR. Die Frequenz wird mit einer Torzeit von 1 ms mit einem 16-Bit Zähler im CPLD gemessen. Bei 65 MHz erfolgt daher ein Zählerüberlauf. Das kann durch Verkürzen der Torzeit oder durch Erweitern des Zählers auf mehr Bit vermieden werden. Beides wäre problemlos möglich, ist aber im Moment unnötig.
UDIFF0 und UDIFF1
UDIFF0 und UDIFF1 sind die beim Kalibrieren gemessenen Spannungen am Ausgang des Tiefpasses. Zum Kalibrieren wird der PWM Ausgang einmal auf low und einmal auf high gelegt und die jeweilige Ausgangsspannung des Tiefpasses gemessen. Damit liegen die Eckspannungen für 0° und 180° Phasenverschiebung fest.
Config
Hier können ein paar Konfigurationsdaten eingegeben werden, die später zur Meßauswertung benötigt werden.
Koppeldämpfung
Die Koppeldämpfung ist die Dämpfung des eingesetzten Richtkopplers. Sie hängt vom Verhältnis der Windungszahlen ab. 30 dB ist ein vernünftiger Wert, mehr als 35 dB eher unwahrscheinlich, weil es eine zu hohe Windungszahl der Übertrager des Kopplers erfordert.
Dämpfung UF und UR
Hier wird die zusätzliche Dämpfung zwischen den Ausgängen des Richtkopplers und den Eingängen der logarithmischen Verstärker eigegeben. Im Testaufbau sind hier etwa 6 dB Dämpfung eingebaut. Schon die ersten Messungen haben gezeigt, das beide Kanäle nicht vollkommen symmetrisch sind, sondern bis zu 4 dB voneinander abweichen. Leider ist diese Abweichung auch noch frequenzabhängig. Für die hier gezeigten Messungen wurde diese Dämpfung so eingestellt, daß die berechneten Vor- und Rücklaufleistungen mit den am Signalgenerator eingestellten Werten übereinstimmen.
Diese beiden Werte sind genau genommen „fudge factors“, Schummelwerte. Das ist unschön, sie machen das Design nicht ohne weiteres reproduzierbar, wenn man es auf höhere Genauigkeit anlegt. Im Grunde müsste jede einzelne Platine ausgemessen werden, wenn man den Fehler nicht akzeptieren will. Andererseits sei nochmal darauf hingewiesen, daß es sich hier nicht um ein hochpräzises Meßgerät handelt und daß man in der Praxis sowieso einen SWR-Minimalwert statt eines absoluten Wertes sucht. Geringe Abweichungen sind dann irrelevant.
SWR
Im rechts gezeigten Smith-Diagramm können bis zu drei SWR-Kreise angezeigt werden. Ihre Werte können in diesen drei Feldern eingestellt werden.
Berechnung
In dieser Group Box werden die Rechenergebnisse angezeigt, die sich aus den Meßwerten ergeben. Die Berechnungen erfolgen genau so, wie es in diesem Calc-Spreadsheet gezeigt wurde.
Vor/Rücklauf in dBm
Diese Felder zeigen die errechneten Vor- und Rücklaufleistungen in dBm an. Weil die vorhin erwähnten UF/UR-Dämpfungen entsprechend eingestellt wurden, sind das genau die Leistungen, die am Testgenerator ausgegeben werden.
Vor/Rücklauf in V
Hier sind die vorher berechneten Leistungen von dBm in V umgerechnet.
Phasenwinkel
Dieses Feld zeigt den aus UDIFF und UR_LD unter Berücksichtigung von UDIFF0 und UDIFF1 berechneten Phasenwinkel an. Er wird wie in der Mathematik üblich entgegen dem Uhrzeigersinn gezählt. Rechts ist 0°, oben 90°, links 180° und unten 270°. 270° sind identisch mit ‑90° und 180° sind dasselbe wie ‑180°.
Die Bildunterschrift zeigt den am Signalgenerator eingestellten Wert. Wegen der Schwellspannung der Komparatoren von etwa 5 mV ergibt sich eine Diskrepanz zum gemessenen Wert. Diese Diskrepanz steigt mit niedriger werdender Rücklaufspannung UR, so daß bei weniger als 30 dBm keine zuverlässige Messung des Phasenwinkels mehr möglich ist. Das ist in der Praxis überhaupt kein Problem, denn das Stehwellenverhältnis ist dann schon besser als 1,1.
SWR
Hier wird das aktuell gemessene Stehwellenverhältnis angezeigt.
Gamma und |Gamma|
Gamma zeigt den aus dem Phasenwinkel und dem Verhältnis von UV und UR errechneten vektoriellen Reflexionsfaktor. |Gamma| ist der Betrag dieses Reflexionsfaktors.
Ausgangsleistung
Das ist die augenblickliche Senderausgangsleistung. Sie wird aus der gemessenen Vorlaufleistung und der Koppeldämpfung berechnet. Die nachfolgend dargestellten Meßergebnisse zeigen, daß eine Senderausgangsleistung von 1 Watt für die Abstimmung völlig ausreichend ist.
Impedanz der Last
Die Impedanz der Last wird aus dem Reflexionsfaktor Gamma berechnet. Siehe auch Formel [6] in der Formelsammlung.
R||X und R‑X
Diese Felder zeigen die Wirk- und Blindwiderstände der Last. Wie bei einem rein ohmschen Widerstandsnetzwerk kann ein vorgegebener Scheinwiderstand auch aus parallel oder seriell geschalteten Einzelwiderständen aufgebaut werden. Die beiden Möglichkeiten werden in diesen Feldern gezeigt. Das ist nützlich bei der Verifikation der Rechenergebnisse mit SimSmith (siehe unten).
Berechnetes Anpassnetzwerk
Dieses Feld zeigt das für die gemessene Frequenz berechnete Anpassnetzwerk und die Topologie an. Es werden hier nur Tiefpässe berechnet, einmal mit einem Kondensator parallel zum Generator und serieller Spule (Gen-ParC-SerL-Load) und einmal mit dem Kondensator parallel zur Last (Gen-SerL-ParC-Load). Hochpasskonfigurationen wären auch möglich, sie werden aber in Antennentunern üblicherweise nicht eingesetzt.
Smith-Diagramm
In diesem Fenster wird das Smith-Diagramm dargestellt. Der Marker zeigt den Meßwert und die roten und grünen Kurven den Verlauf des errechneten Anpassungsnetzwerks hin zur 50-Ω-Referenzimpedanz in der Mitte.
Kontrollrechnung mit SimSmith
Das oben exemplarisch gezeigte Meßergebnis soll nun mit SimSmith verifiziert werden.
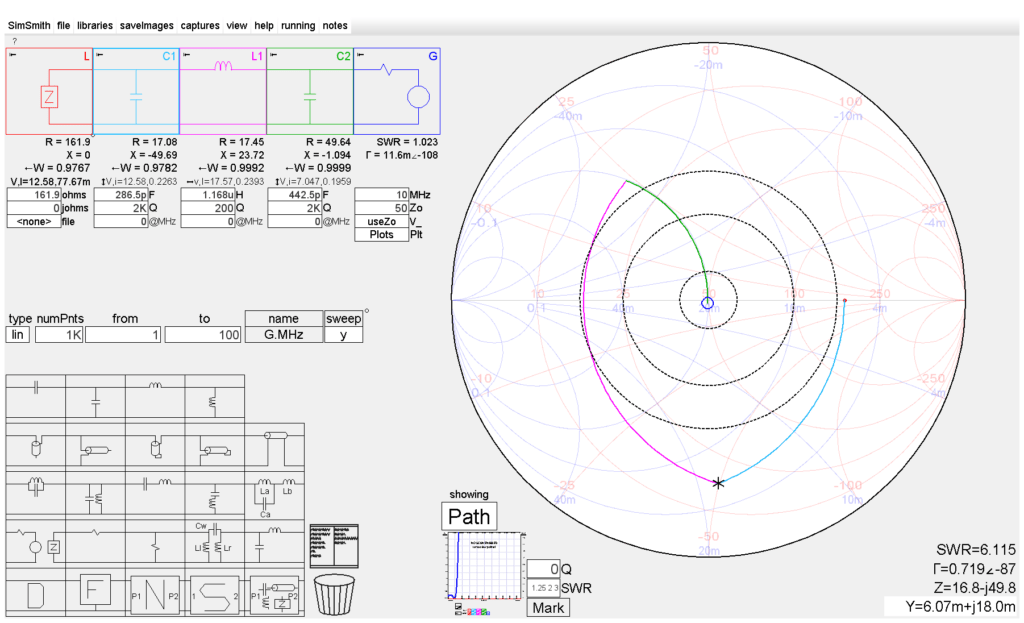
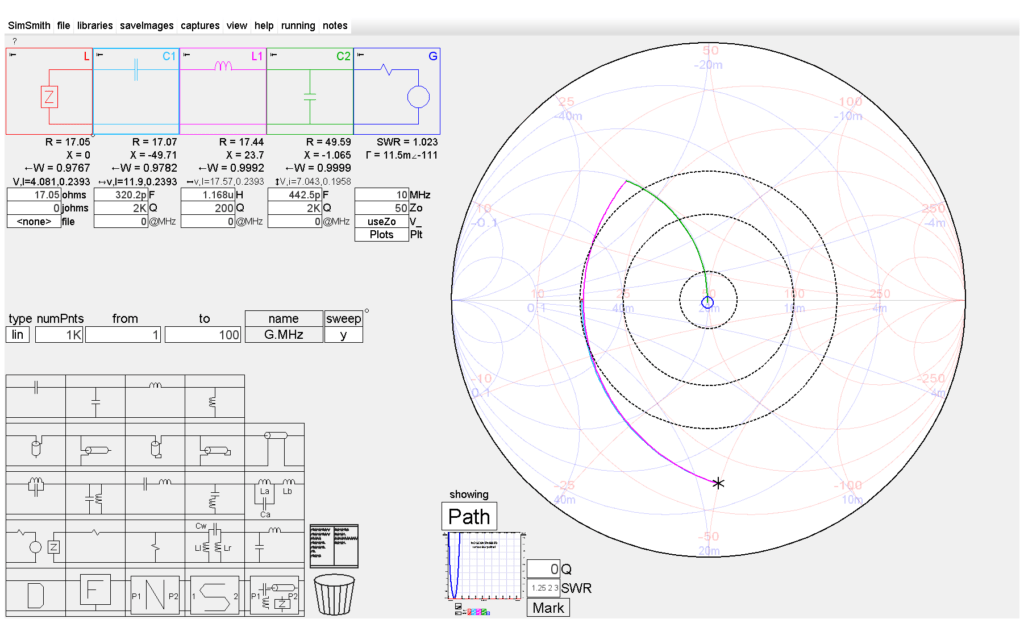
SimSmith Berechnung für ‑3dBm, ‑90° bei 10 MHz, parallele LastSimSmith Berechnung für ‑3dBm, ‑90° bei 10 MHz, serielle Last
Der linke Screenshot zeigt die Simulation der Last mit parallelgeschalteten Elementen, der rechte mit seriell geschalteten Elementen. Die sich daraus ergebende Lastimpedanz ist mit dem Marker gekennzeichnet und deckt sich mit dem Ergebnis der oben gezeigten Auswertesoftware. Auch die gefundene Lösung für das Anpassungsnetzwerk wurde eingezeichnet und auch die deckt sich mit dem Ergebnis der Auswertesoftware.
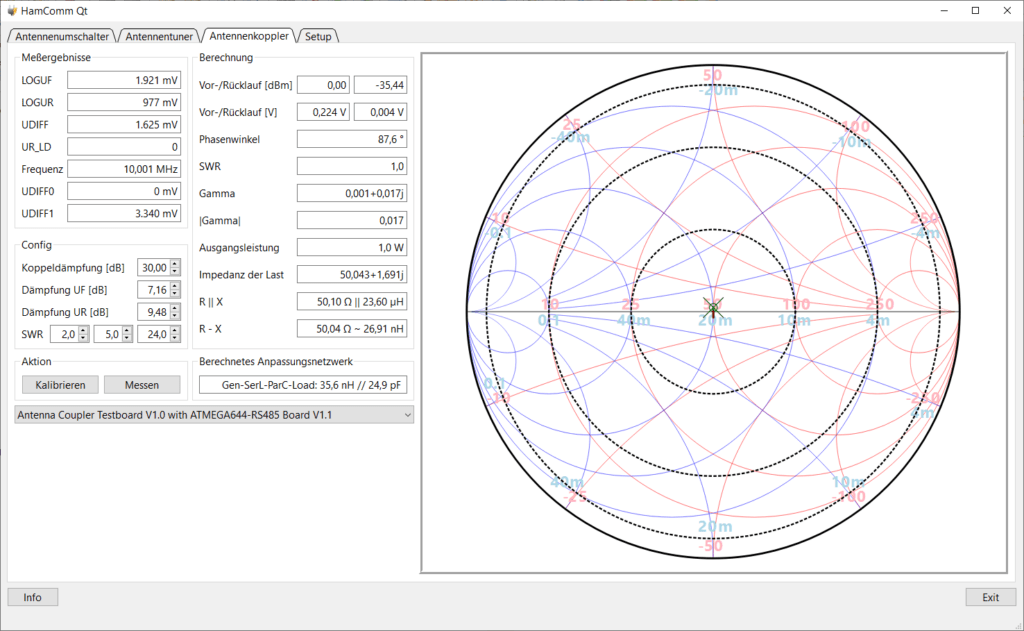
Weitere Meßergebnisse
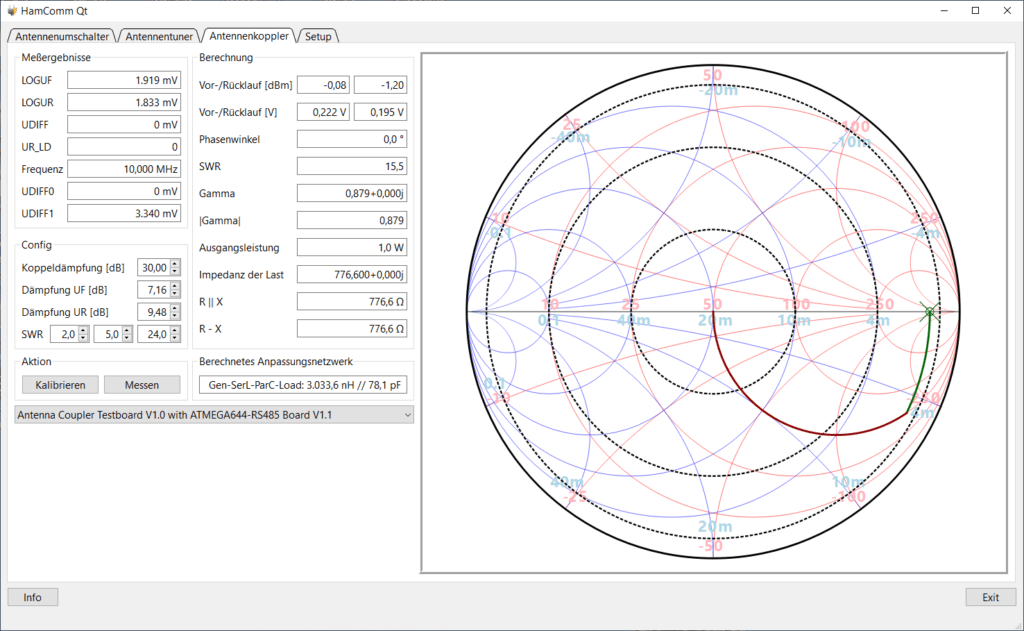
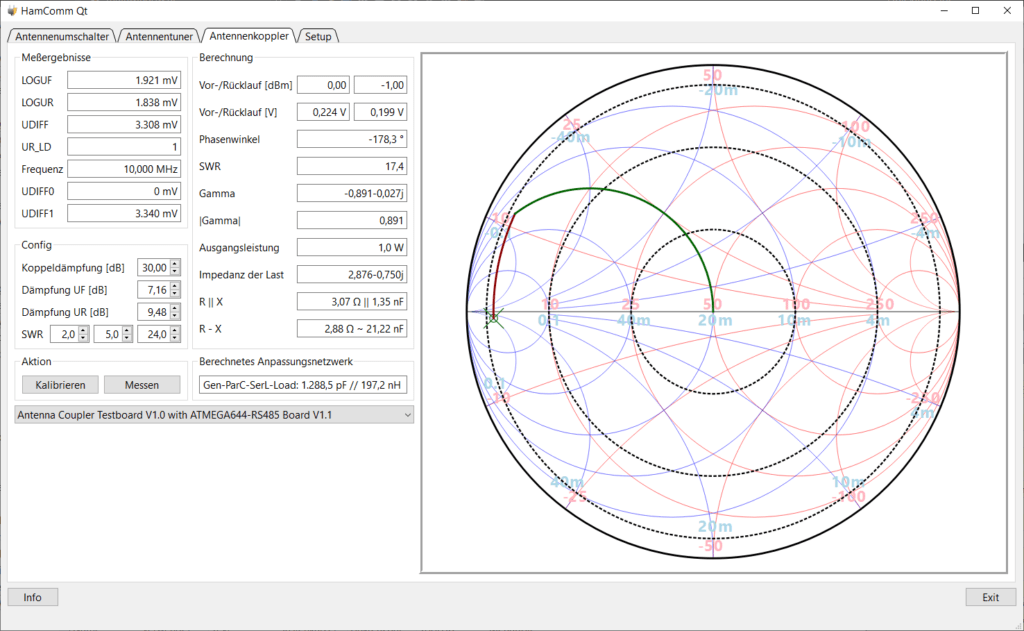
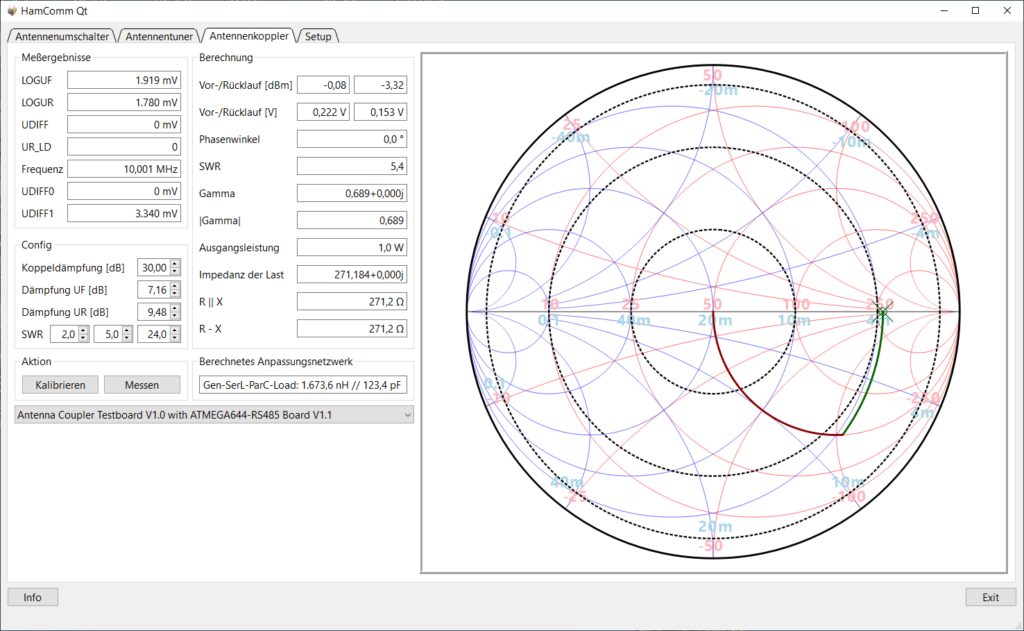
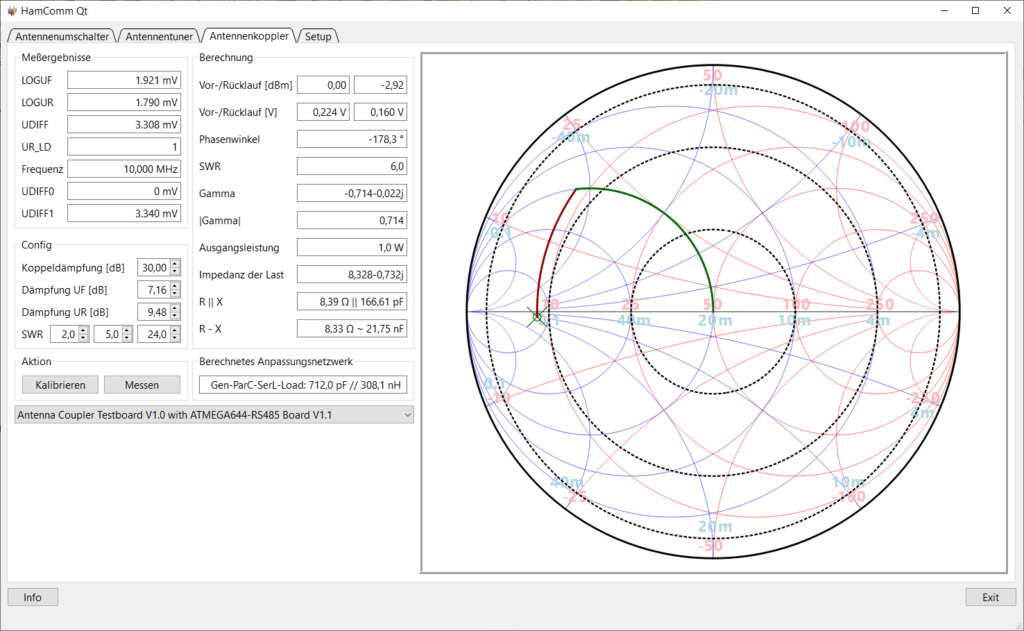
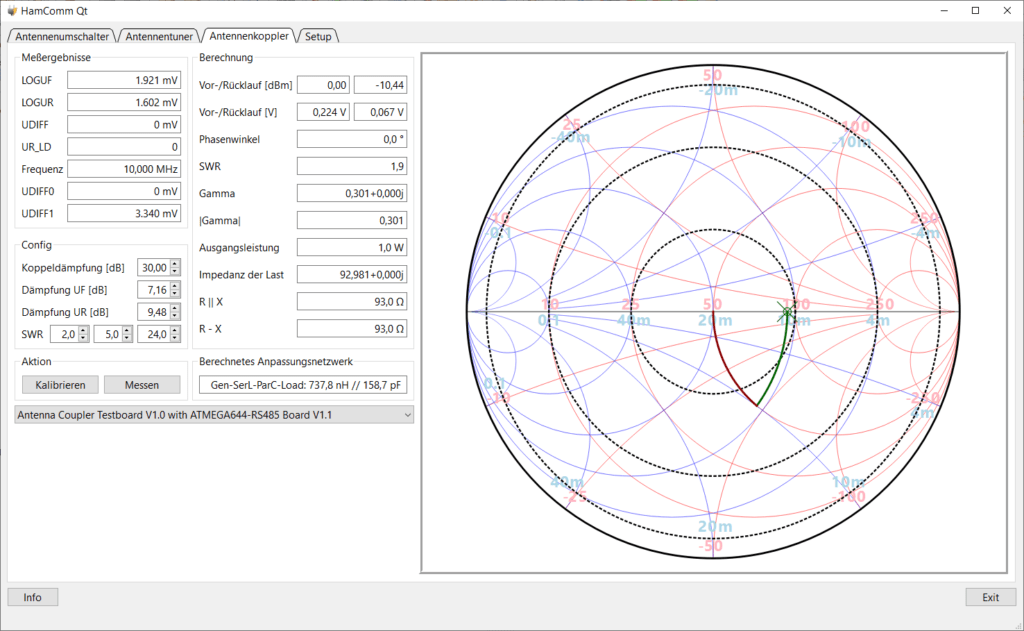
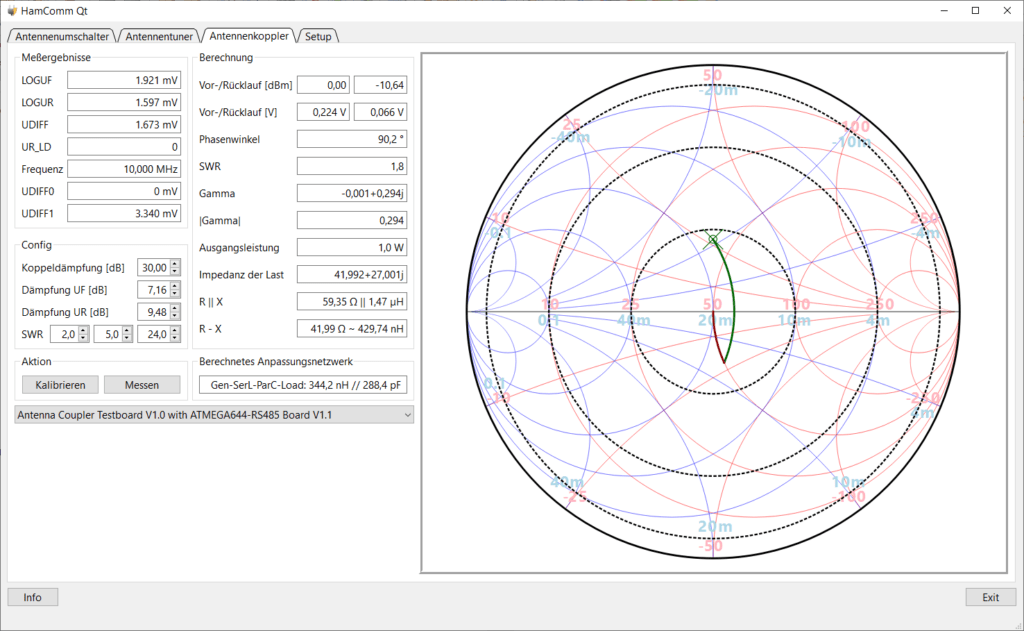
Ohne größere Kommentare werden nachfolgend die weiteren Meßergebnisse für unterschiedliche Phasenwinkel und Rücklaufleistungen dokumentiert. Alle Messungen wurden mit einer Vorlaufleistung von 0 dBm (1 mW) bei 10 MHz durchgeführt.
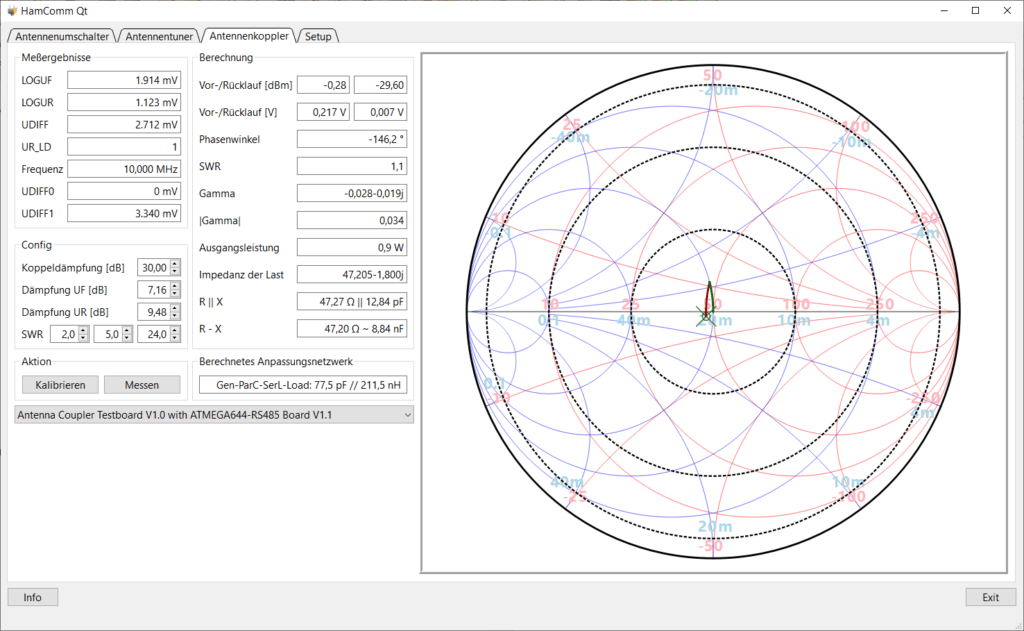
Eine Rücklaufleistung von ‑1 dBm entspricht einem sehr schlechten SWR von 15,5. Fast die gesamte vorlaufende Leistung wird reflektiert. Das starke rücklaufende Signal hat für die Messung aber den Vorteil hoher Meßgenauigkeit. Bei besserem SWR kann das Meßergebnis nur schlechter werden.
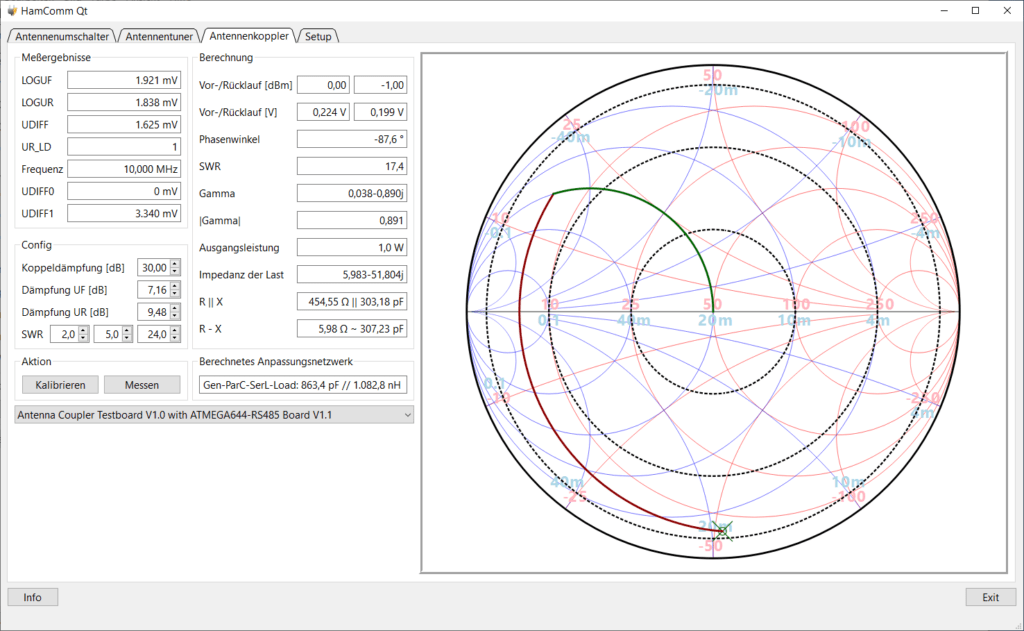
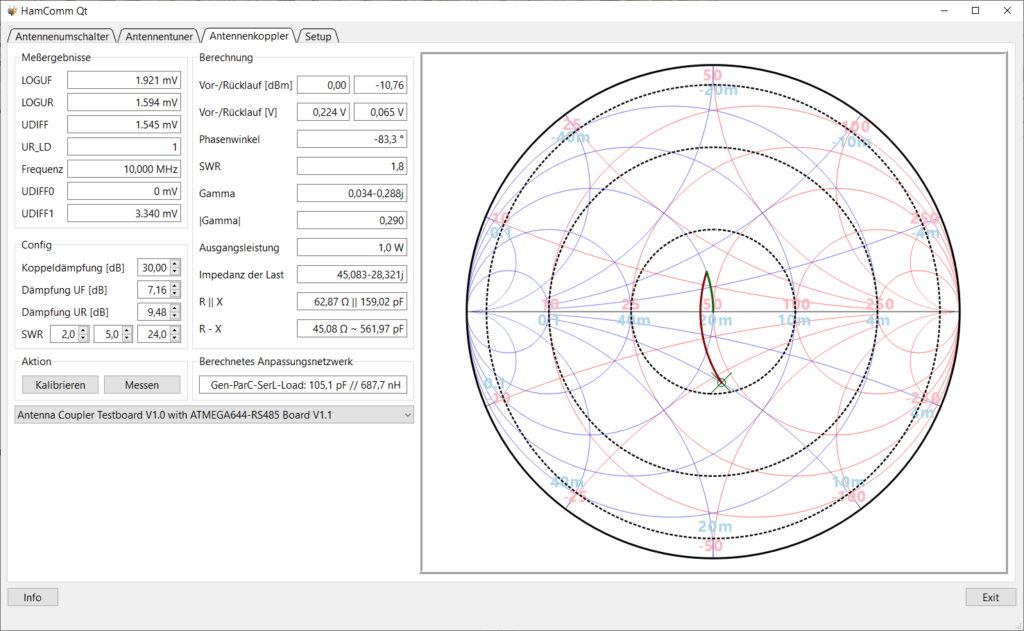
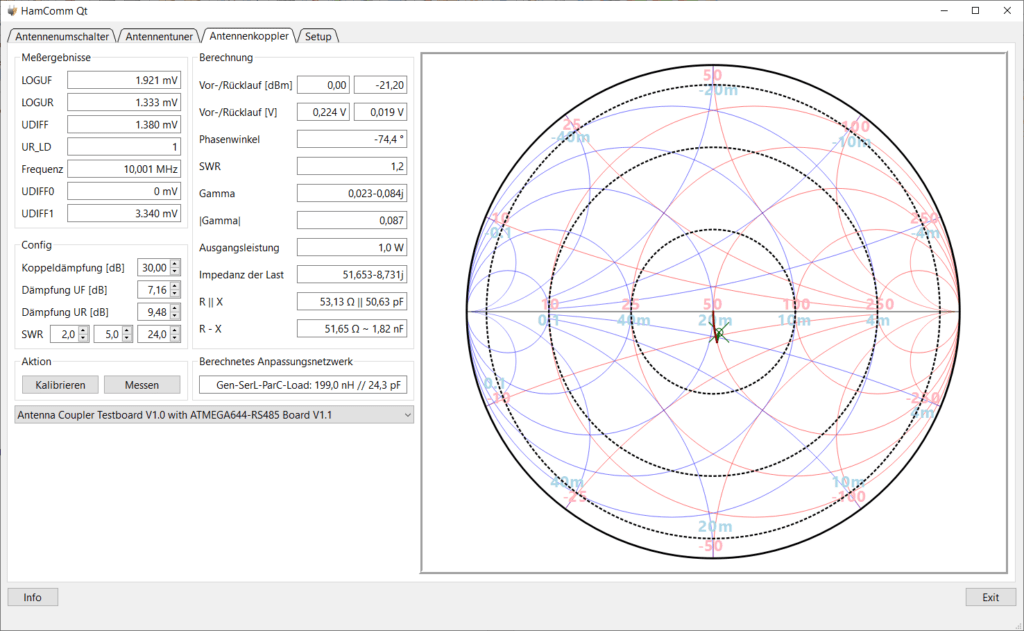
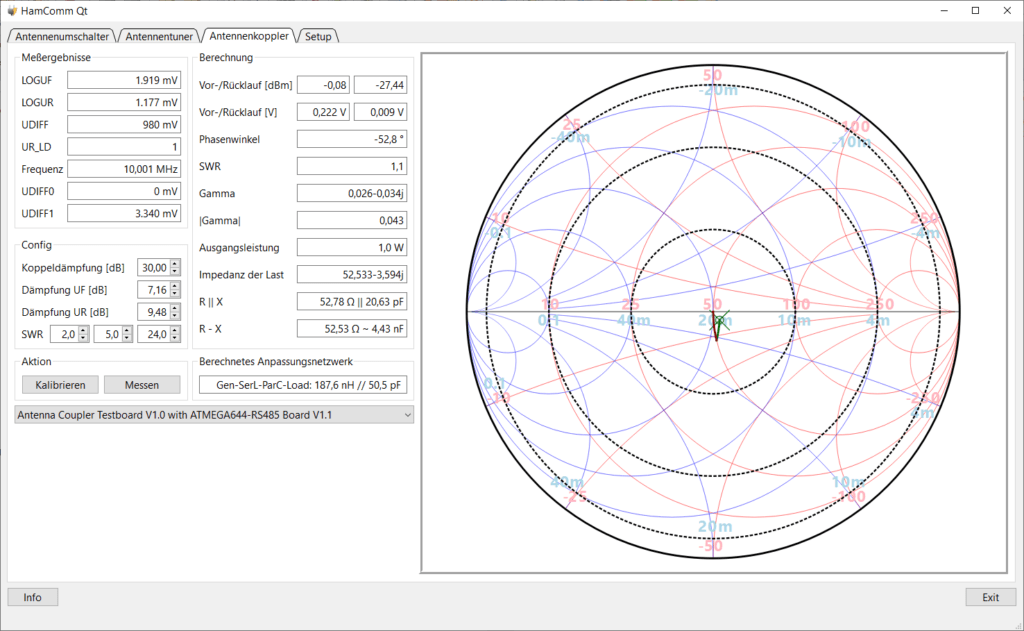
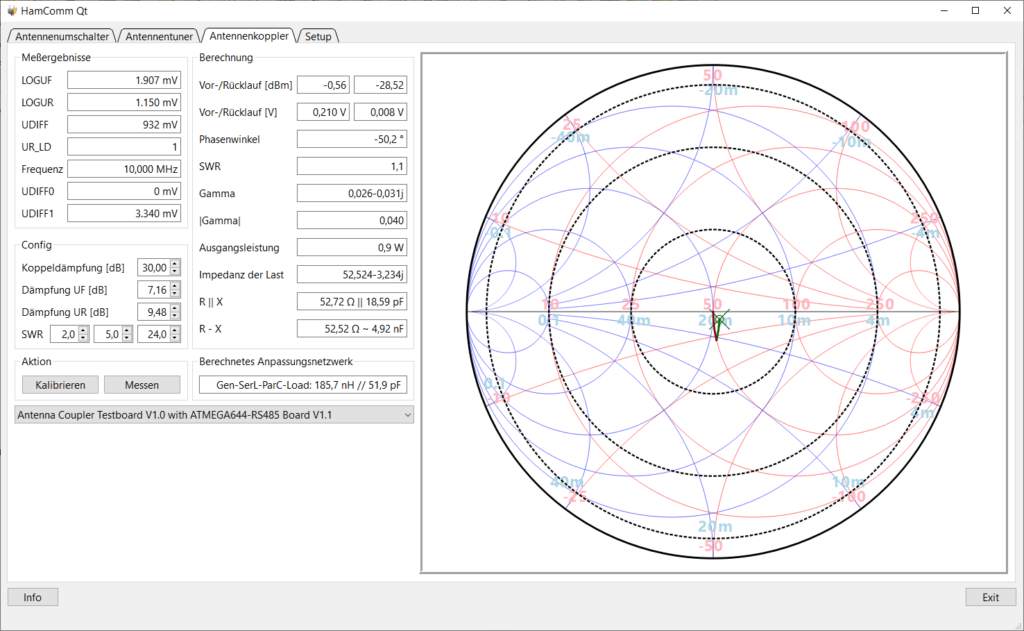
Wenn nur noch ein zehntel der vorlaufenden Leistung reflektiert wird, sinkt das SWR auf einen für den Transceiver gesunden Wert von 1,9. Auch hier zeigen sich keine Meßprobleme, sowohl Phasenwinkel als auch Leistungen werden zuverlässig gemessen.
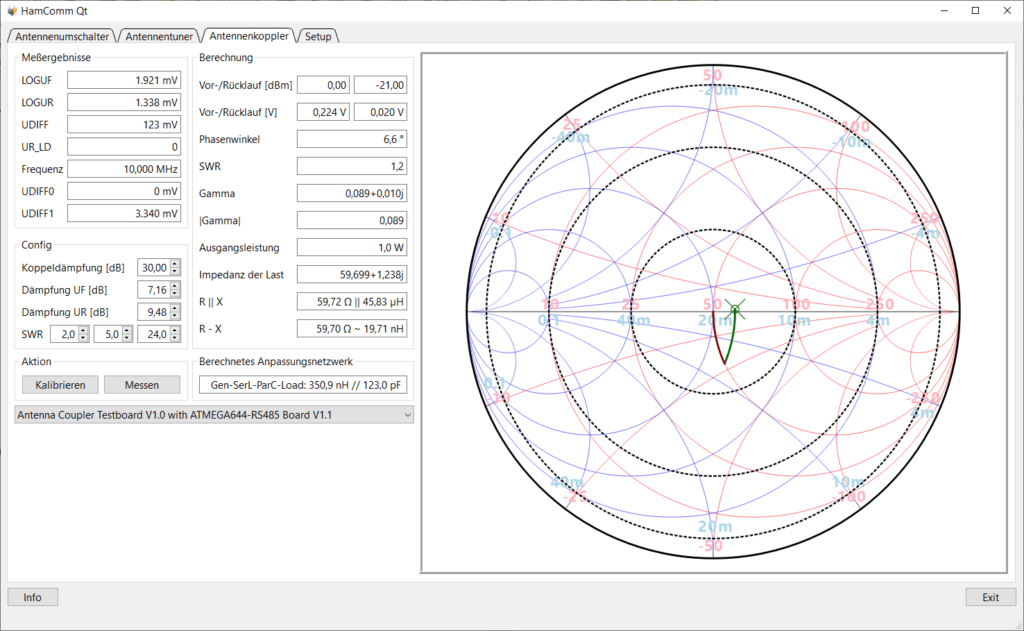
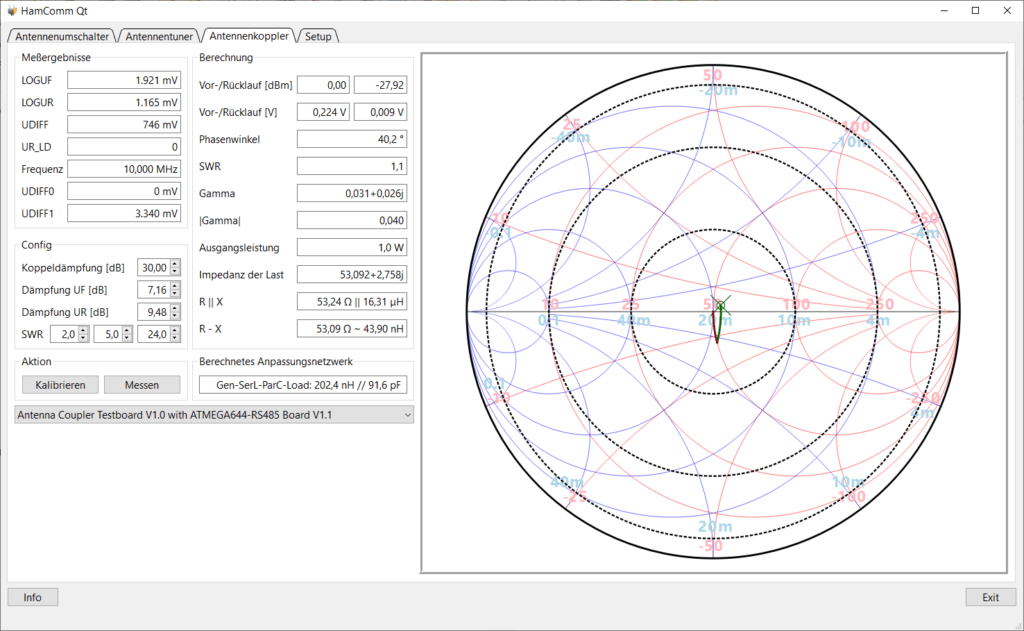
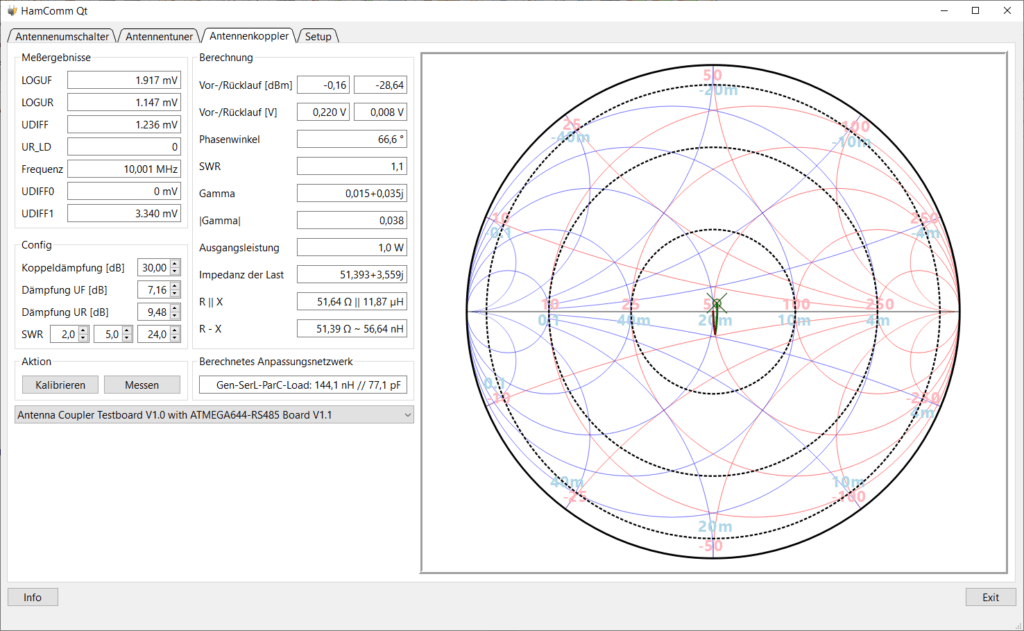
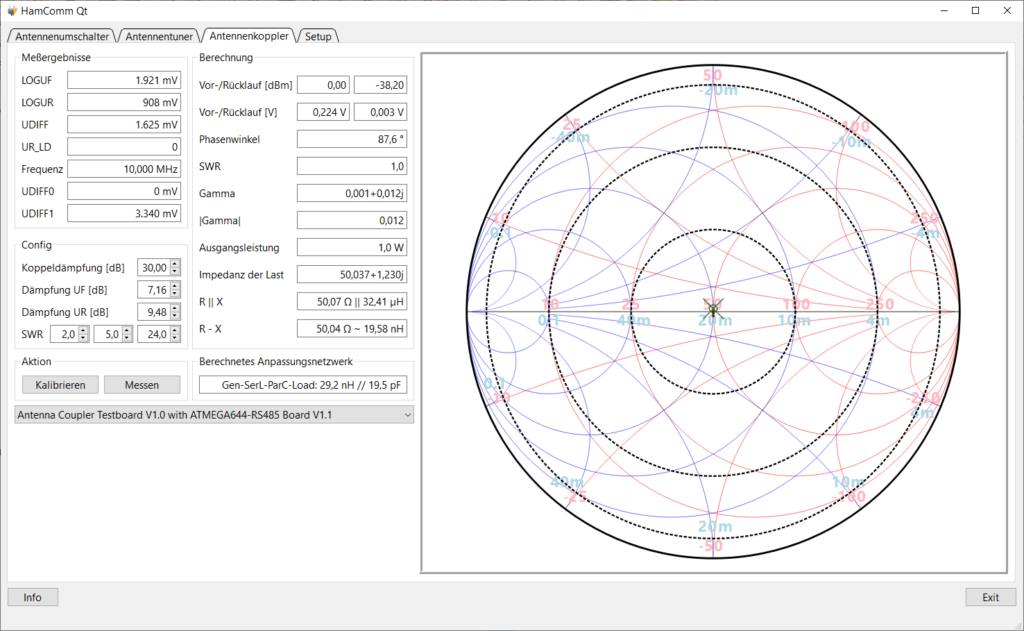
Hier wird nur noch ein hunderstel der vorlaufenden Leistung reflektiert, das SWR sinkt auf 1,2. Der Fehler bei der Messung des Phasenwinkels steigt auf 10° bis 20°, was aber durchaus noch brauchbar ist.
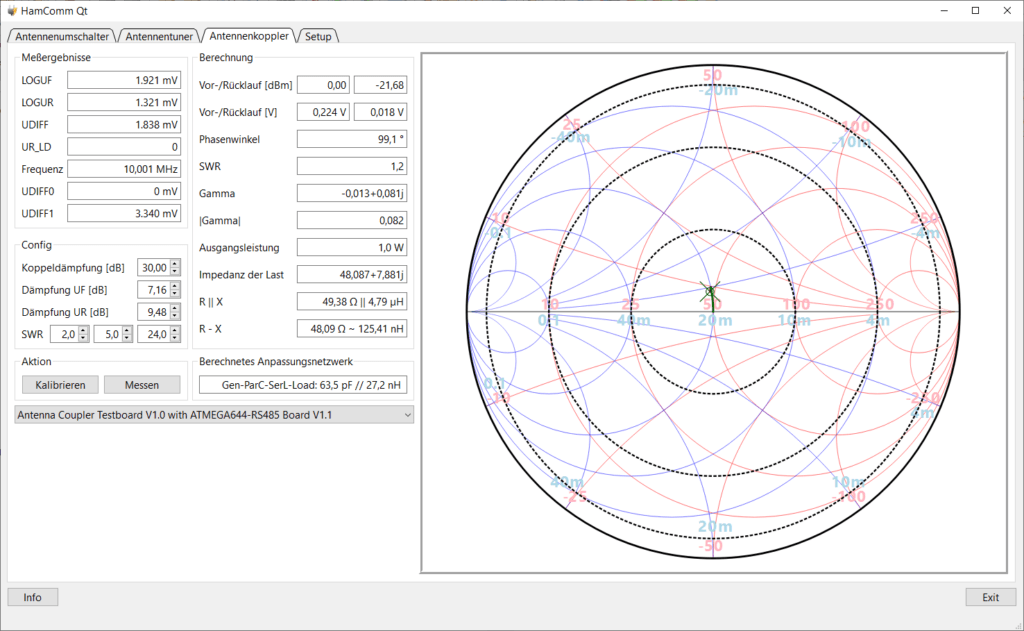
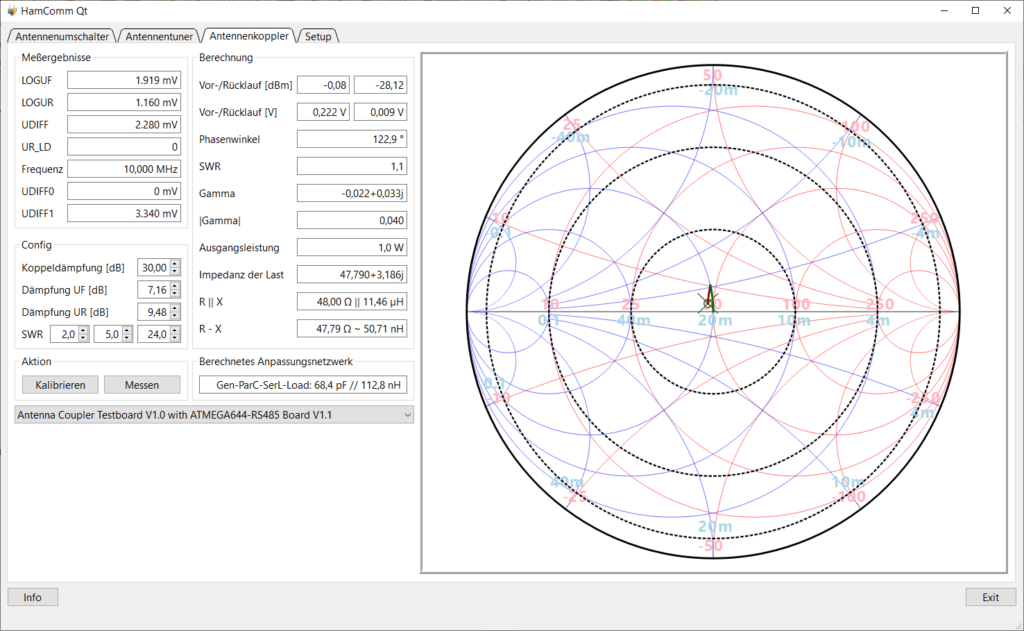
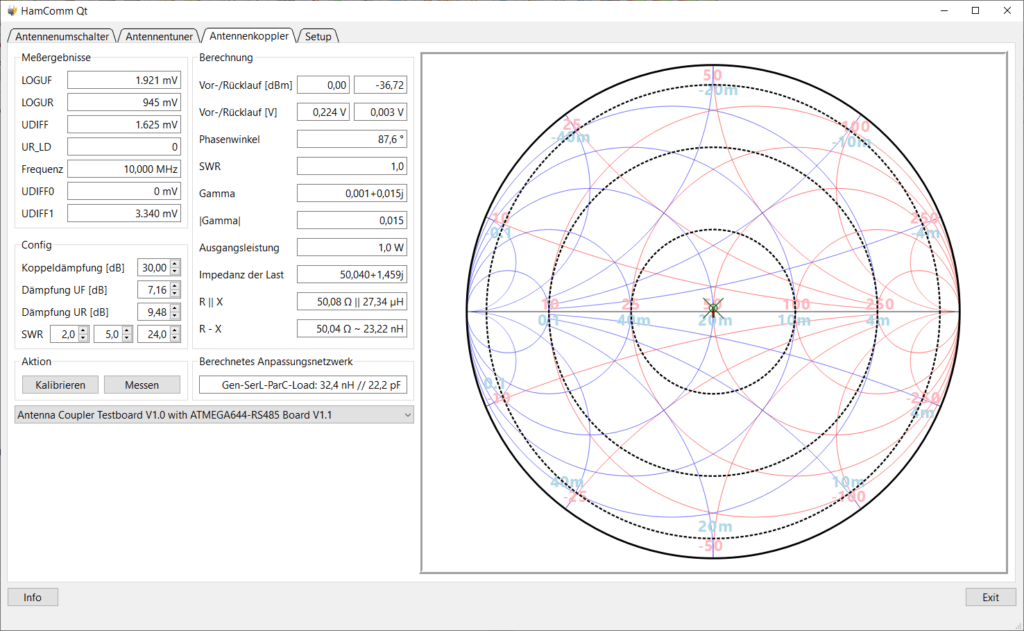
Bei ‑30 dBm kommt man an die Grenzen des Meßbereichs der Phasenmessung. Der gemessene Phasenwinkel weicht stark vom tatsächlichen Phasenwinkel ab. Im Grunde ist die Messung des Phasenwinkels unbrauchbar. Das gilt nicht für die Messung der Leistungen, das SWR wird zuverlässig angezeigt.
Bei ‑40 dBm wird ein SWR von 1,0 angezeigt, weil praktisch keine Leistung mehr reflektiert wird, nur noch ein Zehntausendstel der vorlaufenden Leistung. UDIFF zeigt in allen Messungen einen Mittelwert von etwa 1,624 V an. Das bedeutet, daß der Takt der rücklaufenden Spannung UR nicht mehr erkannt wird.
Zusammenfassung
Die Phasenmessung funktioniert zuverlässig, freilich mit abnehmender Präzision, bis zu einer Rücklaufleistung von etwa ‑30 dBm. Bei einer Koppeldämpfung von 30 dB bedeutet das, daß die Phasenlage mit einer Abstimmleistung von 1 Watt zuverlässig bis zu einem SWR von besser als 1,2 gemessen werden kann. Die Messung des Stehwellenverhältnisses funktioniert auch bei ‑40 dBm noch zuverlässig.
Wer höhere Präzision der Messung anstrebt, kann natürlich die Sendeleistung zum Abstimmen erhöhen. Bei den handelsüblichen Antennenkopplern wird sowieso eine höhere Leistung gefordert, z.B. 5 bis 15 Watt beim AH-730 von ICOM.
Verbesserungsmöglichkeiten
Das hier vorgestellte Design wurde im ersten Teil als Proof-of-Concept bezeichnet. Es hat sich bewährt, die Idee funktioniert. Es gibt natürlich Verbesserungsmöglichkeiten.
Am leichtesten wäre eine Korrektur der Phasenmessung durch die Software zu implementieren. Die Spannung der rücklaufenden Welle ist ja durch die Messung bekannt und so lässt sich trigonometrisch die Phasenverschiebung aus dem späteren Erreichen der Schaltschwelle des Komparators korrigieren.
Die Messung von UDIFF und UR_LD funktioniert hinreichend zuverlässig. Bei einem Redesign würde ich aber UR_LD in irgendeiner Weise tiefpassfiltern. Im Übergangsbereich bei 0° und 180° liegt hier ein hochfrequentes Signal an, das ein Microcontroller nicht so gerne am Eingang sieht.
Die Abweichung der Meßergebnisse am Ausgang der logarithmischen Verstärker macht mir noch etwas Kopfzerbrechen. Hier habe ich bis zu 4 dB Abweichung bei Zimmertemperatur gemessen. Wie mag das erst bei ‑20 °C und +65 °C aussehen, bei Schwankungen der Versorgungsspannung, über den gesamten Frequenzbereich und bei Alterung? Das lässt sich zwar per Software kompensieren, würde aber eine (ggf. regelmäßige) Kalibrierung erfordern. Womöglich wäre es garnicht so abwegig, zu diesem Zweck einen Signalgenerator mit bekannter Ausgangsleistung einzubauen. Ich grüble noch. Ein AD9834 ist in China für wenige Euro zu bekommen. Die Frage ist natürlich, ob der Aufwand gerechtfertigt ist.
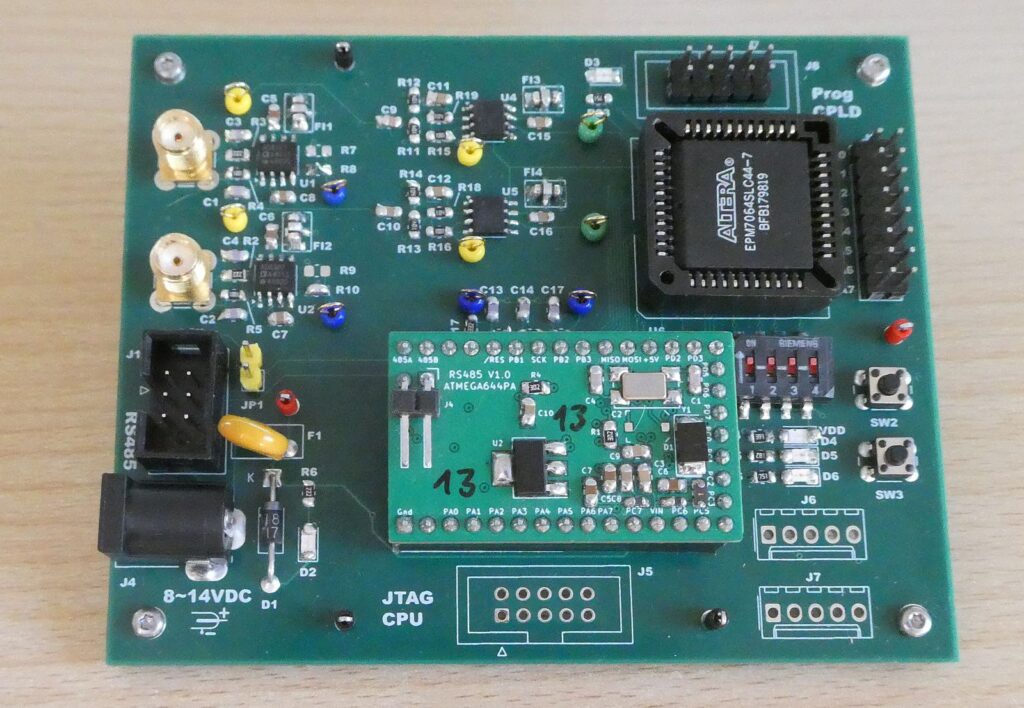
Im ersten Teil habe ich die Grundidee für dieses Reflexionsfaktor-Meßgerät beschrieben und den Schaltplan für ein Experimentalboard vorgestellt. In diesem zweiten Teil beschreibe ich den praktischen Aufbau der Leiterplatte und die Ergebnisse der Messungen. Die Messungen wurden noch ohne Antennenkoppler durchgeführt. Als Signalquelle dient ein Siglent SDG6022X-Funktionsgenerator, als Meßinstrument ein Rigol HDO4404 (das inzwischen mit offensichtlich gleichem Funktionsumfang als Rigol DHO4404 verkauft wird). Auch das Microcontrollerboard hat noch keine Funktion, außer daß es nach dem Einschalten die logarithmischen Verstärker und die Komparatoren enabled.
Foto des POC-Boards
Dieses erste Testboard ist noch kein Prototyp für einen Antennentuner, sondern ein einfaches Experimentalboard, um zu prüfen, ob die Idee überhaupt funktioniert. Im Englischen bezeichnet man das als „proof-of-concept“ oder POC.
Die Stromaufnahme liegt ohne Eingangssignale bei 95 mA und steigt bei 10 MHz Taktsignalen an beiden Eingängen auf 101 mA.
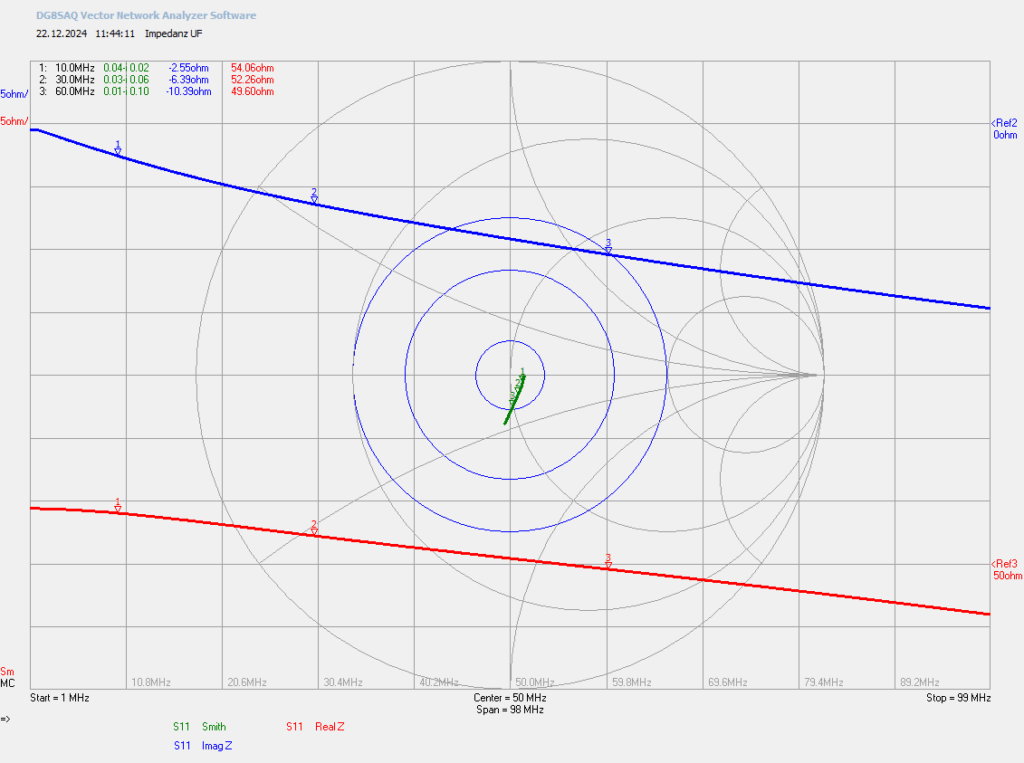
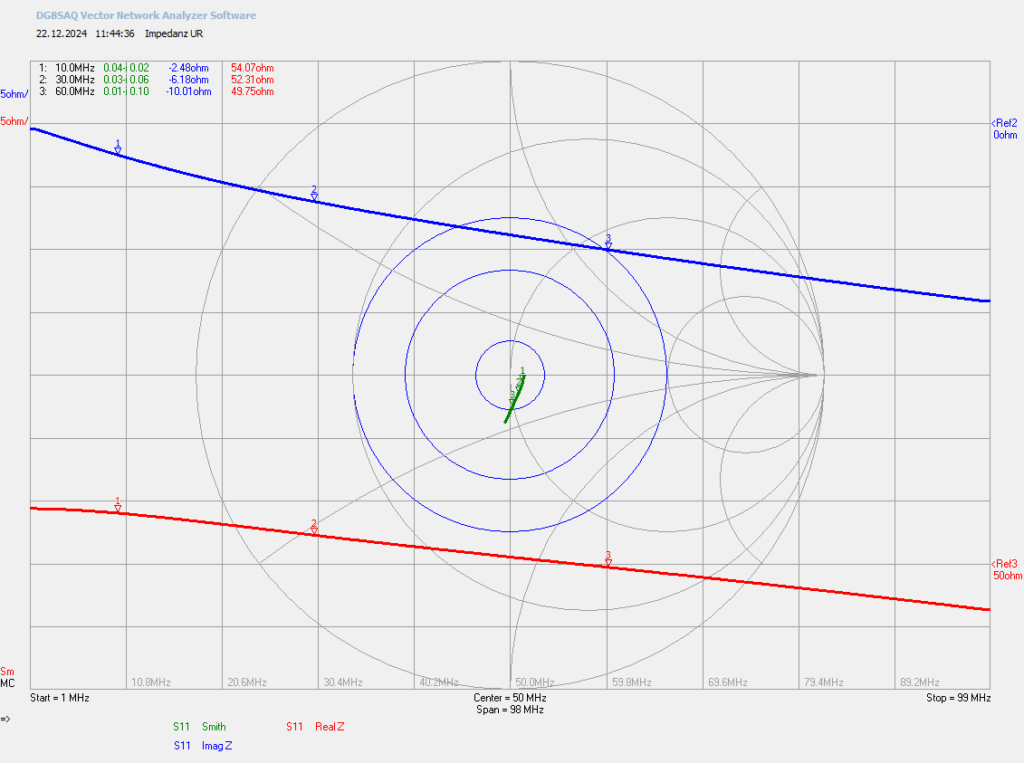
Eingangsimpedanz
Die Eingangsimpedanzen liegen bei etwas über 50 Ω mit leichtem kapazitiven Anteil.
Eingangsimpedanz UFEingangsimpedanz UR
Logarithmische Verstärker
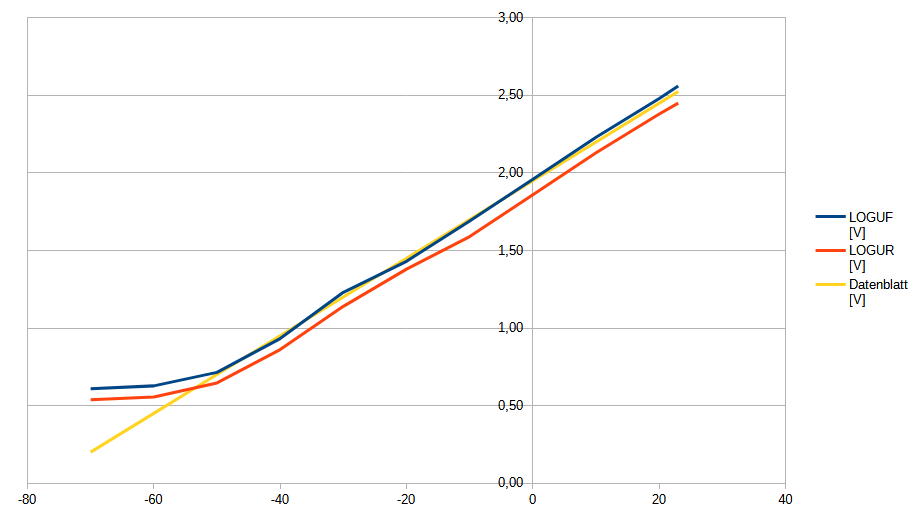
Die Ausgangsspannungen LOGUF und LOGUR der logarithmischen Verstärker wurden bei 10 MHz und Eingangspegeln zwischen ‑70 dBm und +23 dBm gemessen.
Ausgangsspannung der logarithmischen Verstärker gegenüber dem Eingangspegel bei 10 MHz
Beim Vergleich mit Datenblattwerten ist das zusätzliche 6 dB Dämpfungsglied vor den Eingängen zu beachten. Das ist in der gelben Kurve berücksichtigt. Der Verlauf von LOGUF stimmt sehr gut mit dem Datenblatt überein, während LOGUR einen um etwa 100 mV (=4 dB) zu niedrigen Wert anzeigt. Unterhalb von etwa ‑50 dBm flachen beide Kurven ab und ihre Meßwerte sind nicht mehr direkt verwendbar.
Ich habe auch die Frequenzabhängigkeit von LOGUF und LOGUR exemplarisch bei 0 dBm untersucht. Von 1 MHz bis 100 MHz ändert sich LOGUF zwischen 1,98 und 1,84 V und LOGUR zwischen 1,88 und 1,77 V. Beide Kanäle haben also eine Frequenzabhängigkeit von 110 bis 140 mV, die aber bei beiden Kanälen näherungsweise gleich ist und sich daher kompensiert.
Komparatoren
Die analoge Differenzspannung UDIFF
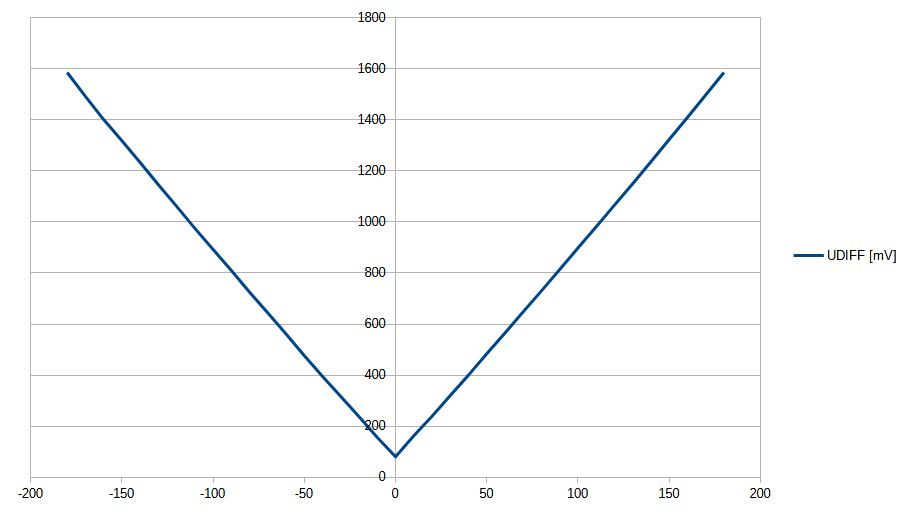
Die Messung der Differenzspannung UDIFF hinter dem Tiefpass zeigt das beabsichtigte lineare Verhalten.
Differenzspannung UDIFF hinter dem Tiefpass
UDIFF ist bei einer Phasenverschiebung in einer Richtung gleich groß, wie bei gleicher Phasenverschiebung in die andere Richtung. Wie bereits im ersten Teil erklärt, wird das Vorzeichen der Verschiebung mit dem Signal UR_LD angezeigt. Es ist im Testboard mit LED3 verbunden, die diese Verschiebung optisch anzeigt. Bei 0° und 180° Phasenverschiebung kommt es zu Unsicherheiten bei der Richtungserkennung, gegebenenfalls auch zu Metastabilitäten, weil CLKUR nicht nach den Regeln der Kunst einsynchronisiert wurde. Das macht aber nichts, weil UDIFF in beiden Fällen gleich ist und der möglicherweise falsch errechnete Phasenwinkel nur wenig vom tatsächlichen abweicht.
Die digitalen Taktsignale
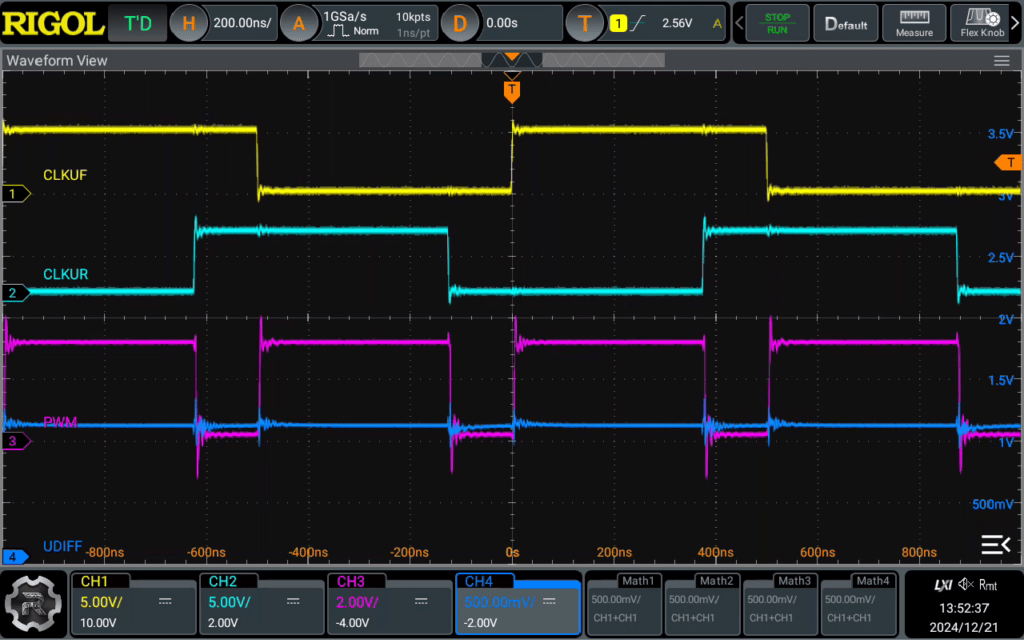
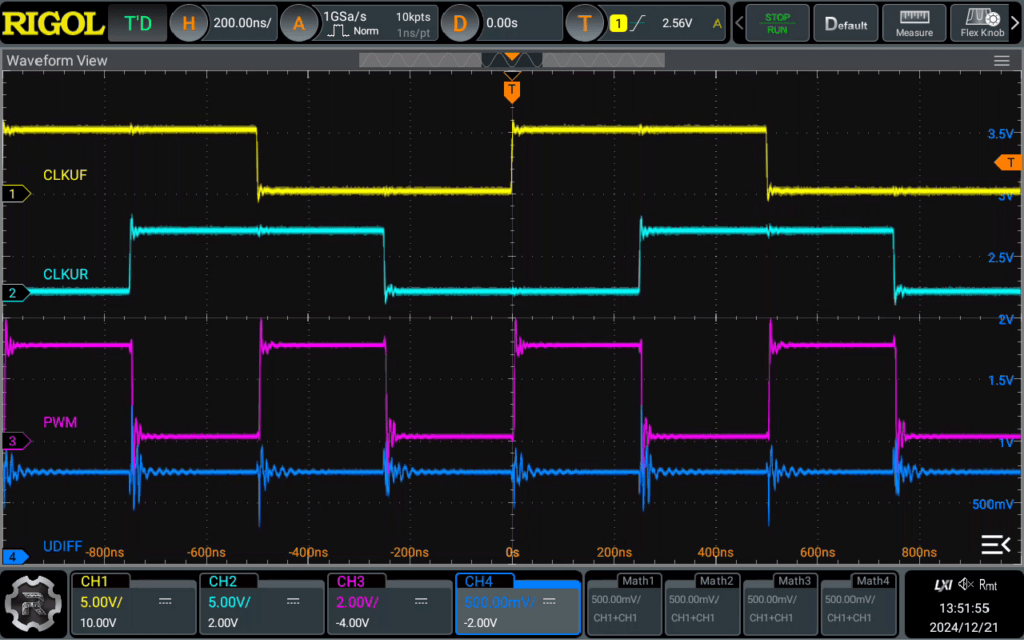
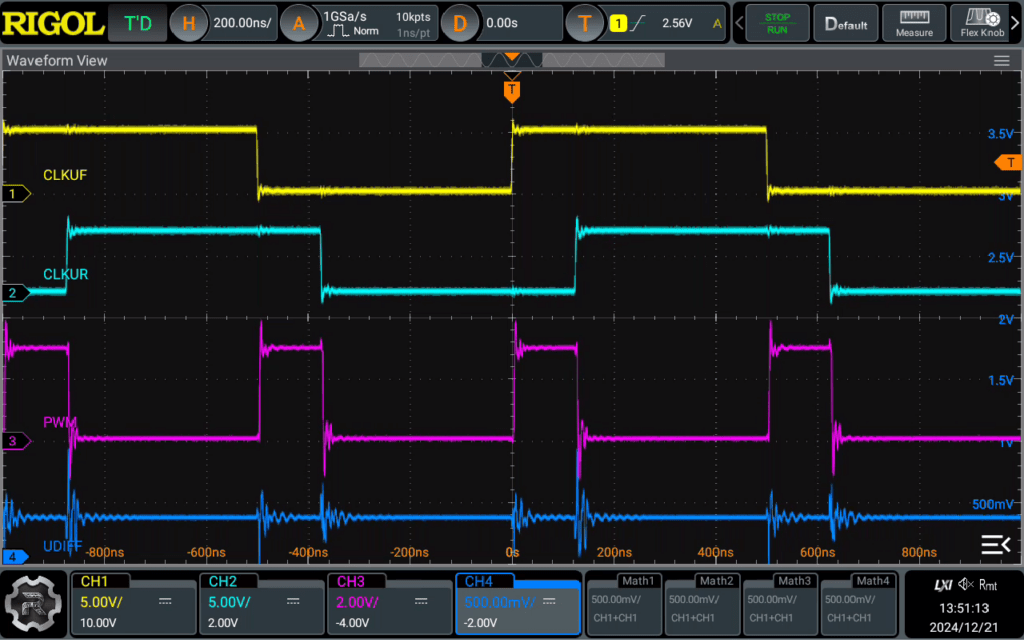
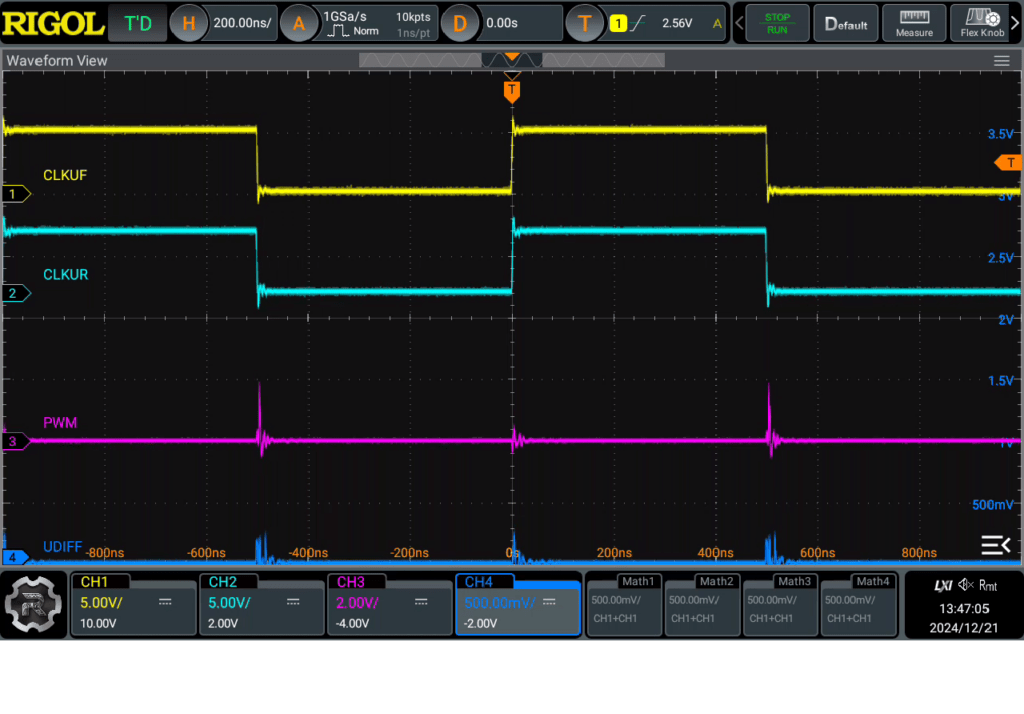
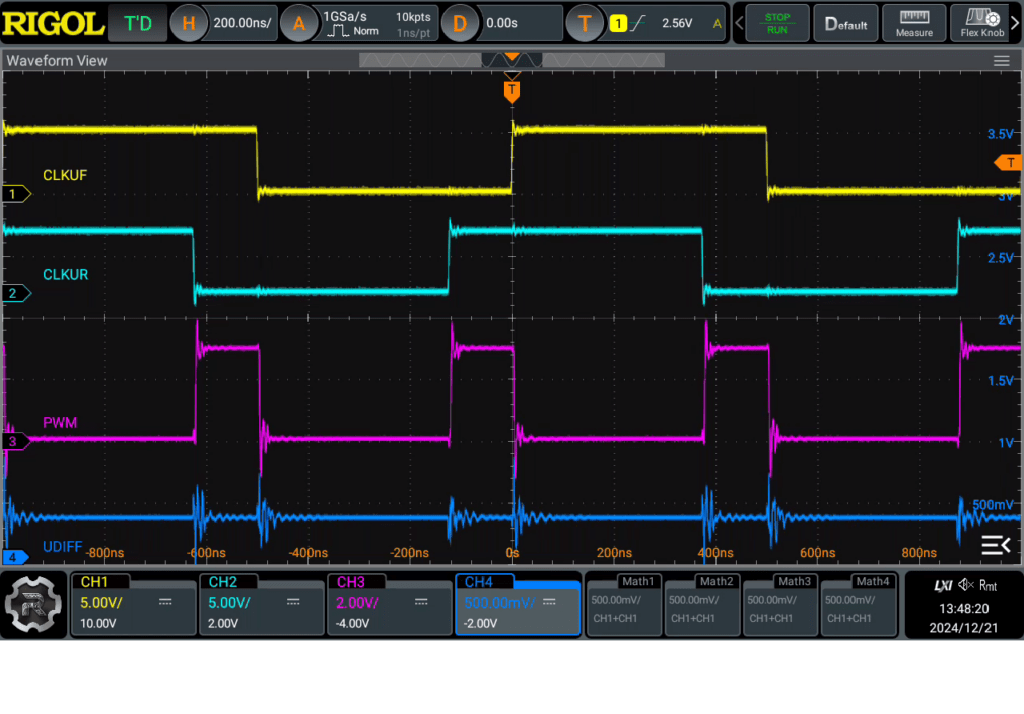
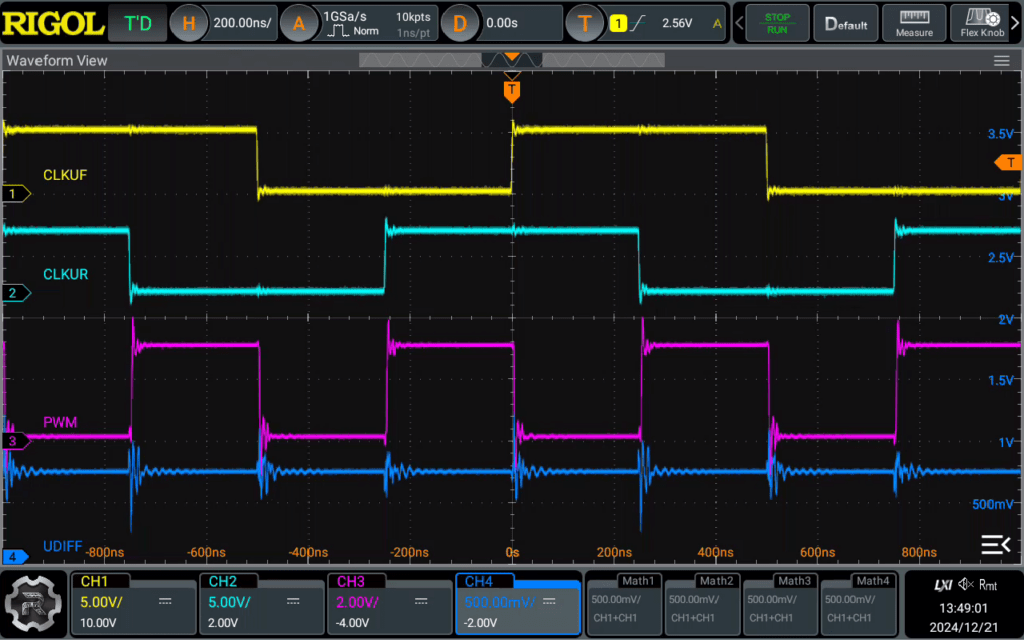
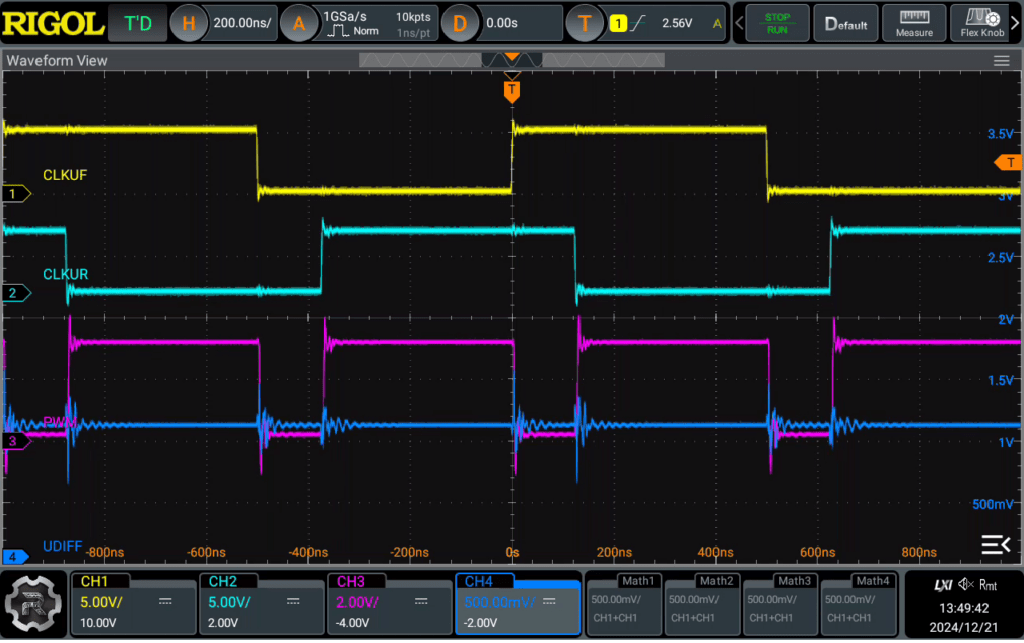
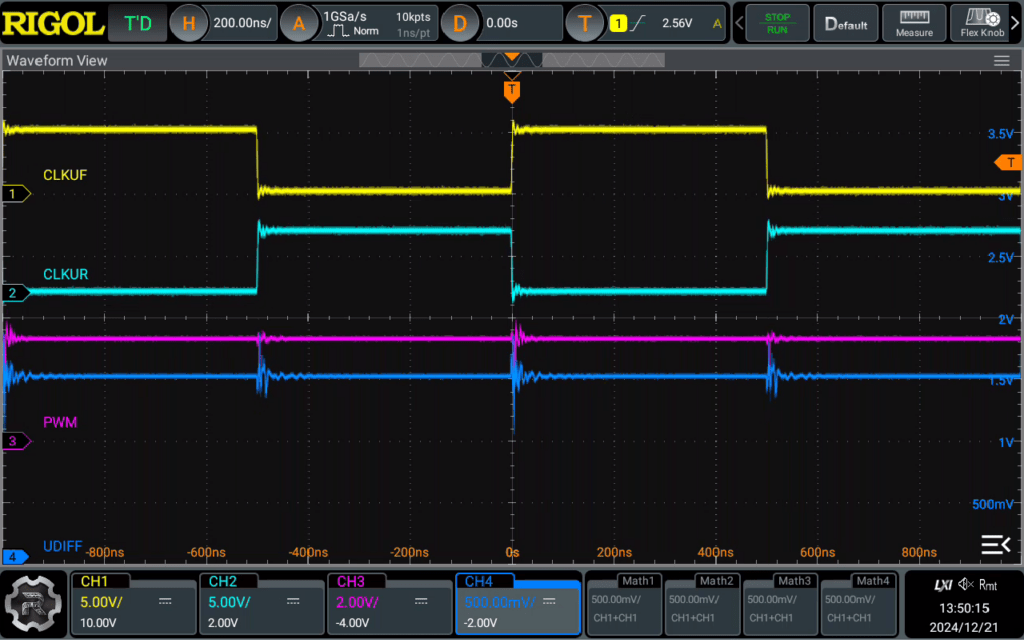
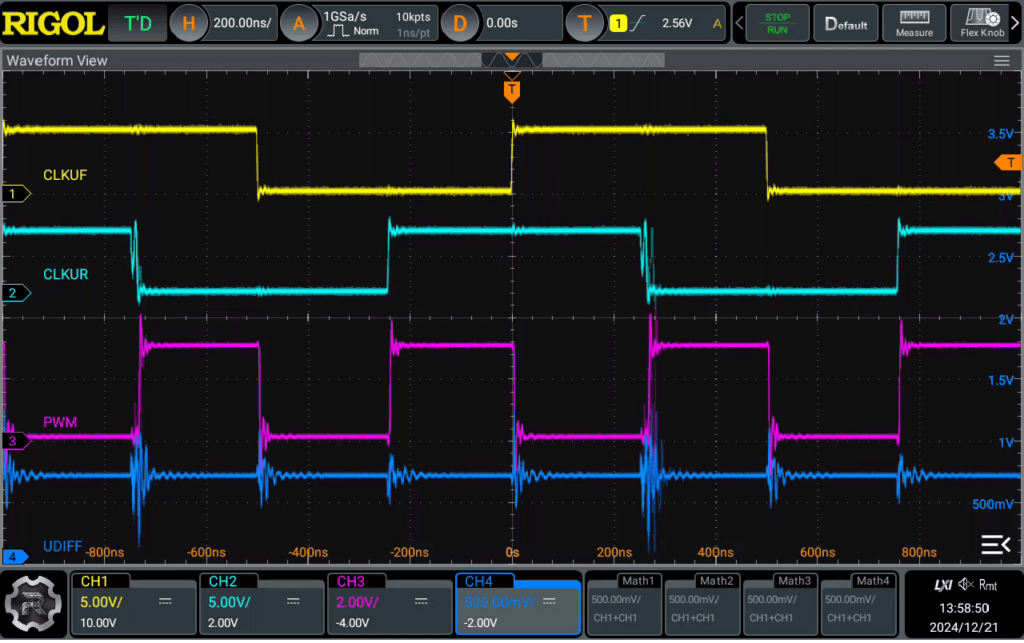
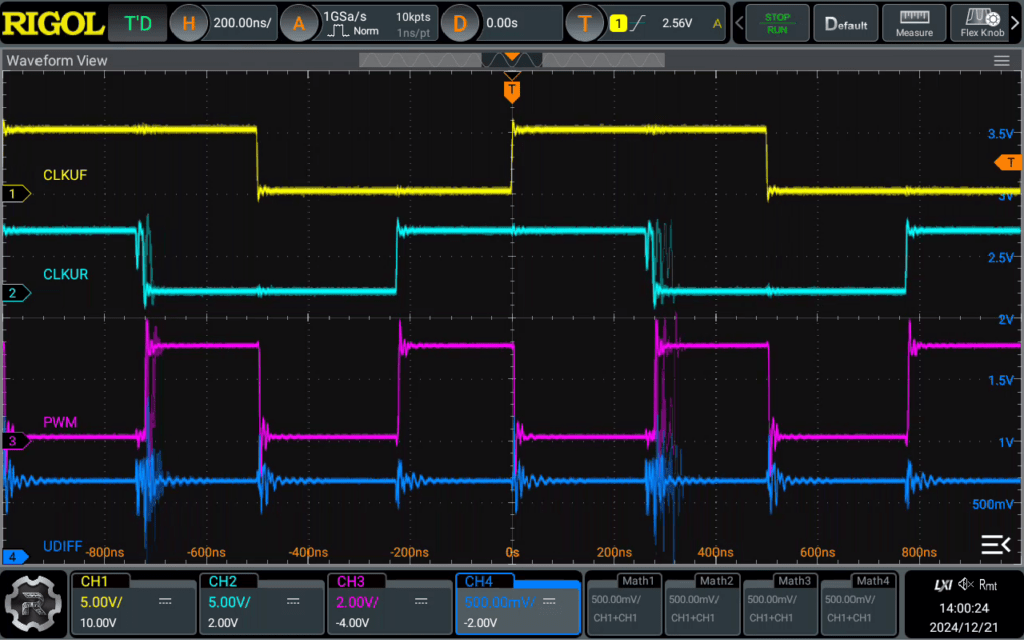
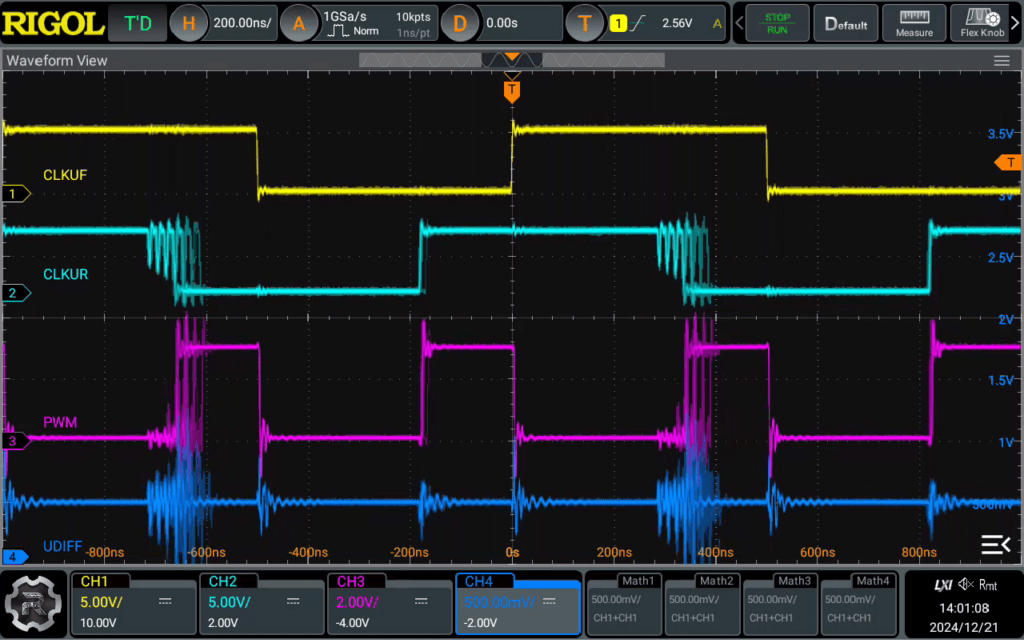
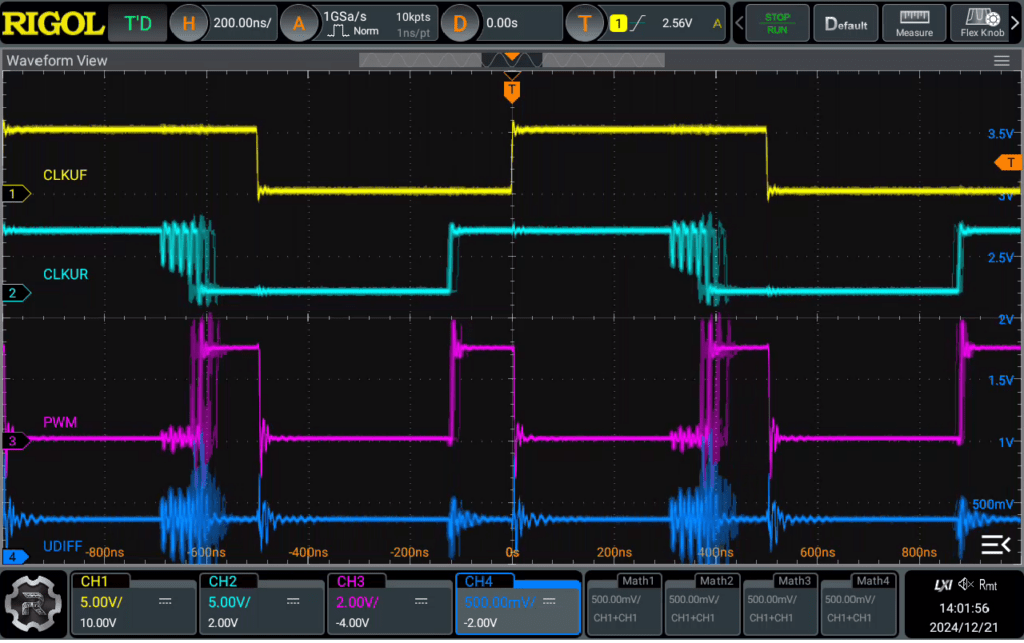
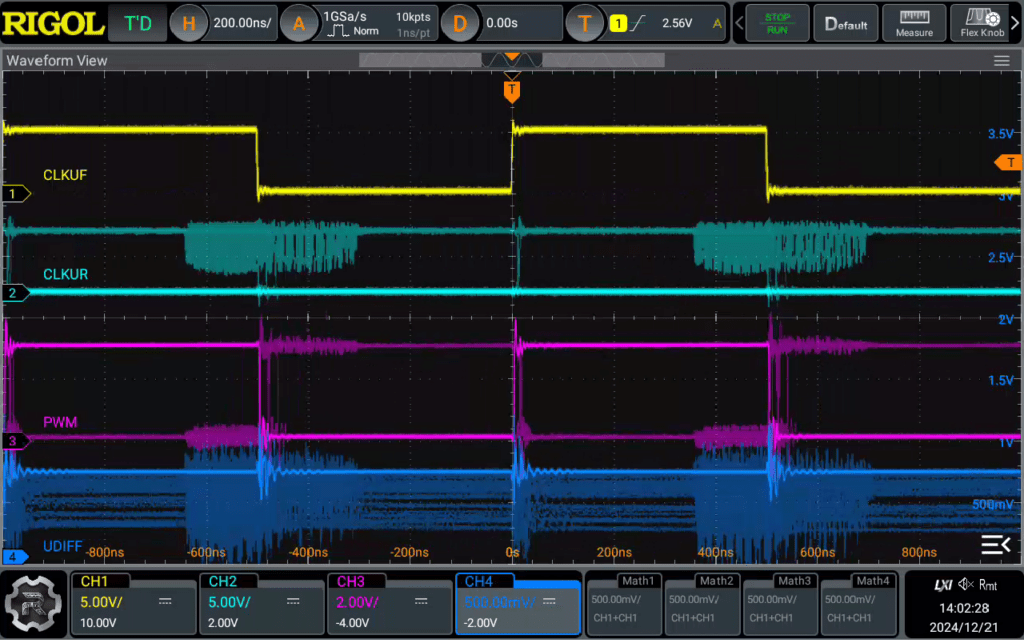
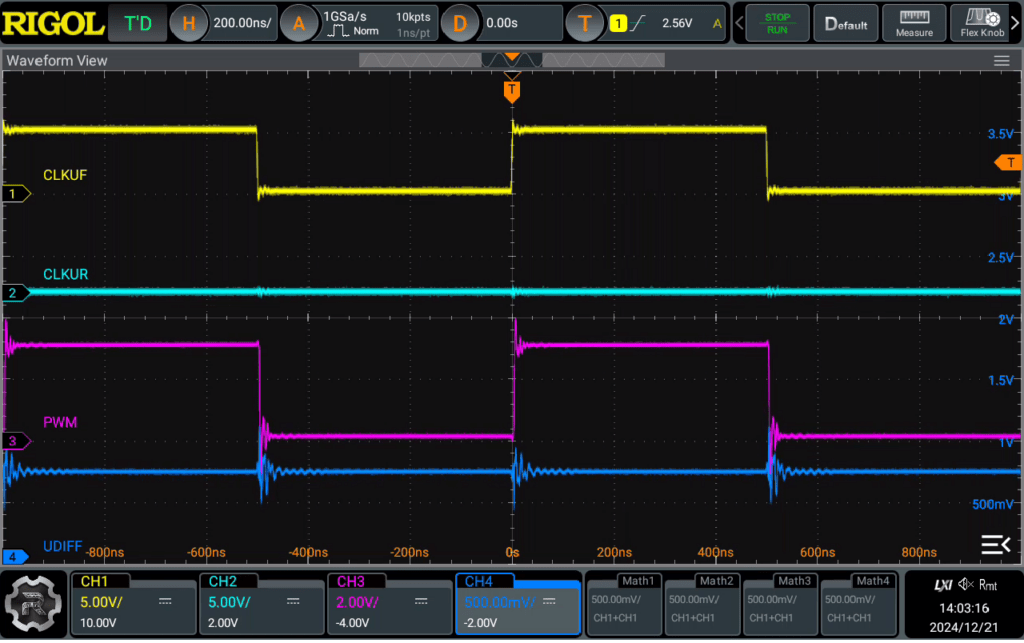
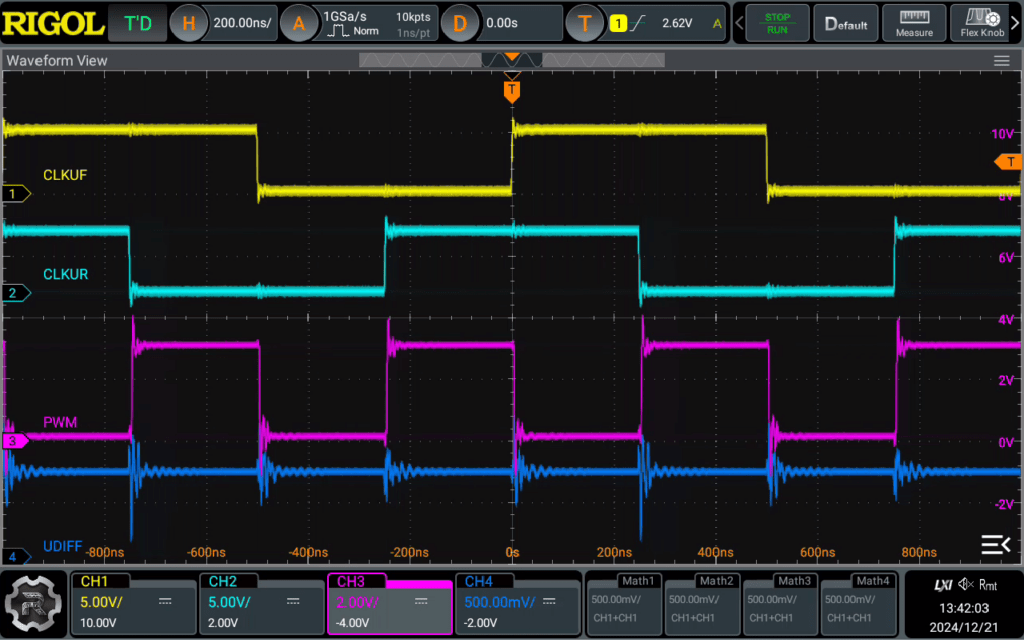
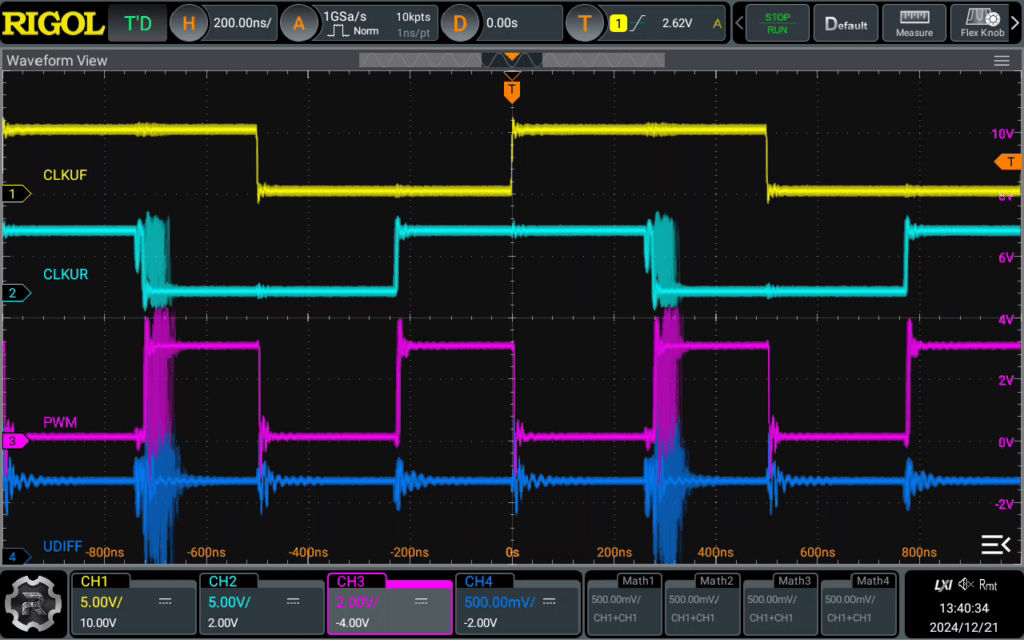
Die nachfolgenden Oszillogramme zeigen die die digitalen Taktsignale CLKUF und CLKUR direkt an den Ausgängen der Komparatoren bei Phasenverschiebungen zwischen ‑180° und +180°. Beide Eingangspegel liegen bei „gesunden“ 0 dBm und die Eingangsfrequenz beträgt 10 MHz.
-135° Phasenverschiebung zwischen CLKUF und CLKUR. Frequenz=10 MHz, Eingangspegel jeweils 0 dBm.-90° Phasenverschiebung zwischen CLKUF und CLKUR. Frequenz=10 MHz, Eingangspegel jeweils 0 dBm.-45° Phasenverschiebung zwischen CLKUF und CLKUR. Frequenz=10 MHz, Eingangspegel jeweils 0 dBm.0° Phasenverschiebung zwischen CLKUF und CLKUR. Frequenz=10 MHz, Eingangspegel jeweils 0 dBm.45° Phasenverschiebung zwischen CLKUF und CLKUR. Frequenz=10 MHz, Eingangspegel jeweils 0 dBm.90° Phasenverschiebung zwischen CLKUF und CLKUR. Frequenz=10 MHz, Eingangspegel jeweils 0 dBm.135° Phasenverschiebung zwischen CLKUF und CLKUR. Frequenz=10 MHz, Eingangspegel jeweils 0 dBm.180°=-180° Phasenverschiebung zwischen CLKUF und CLKUR. Frequenz=10 MHz, Eingangspegel jeweils 0 dBm.
Außerdem wird das erzeugte PWM Signal angezeigt, sowie die analoge Spannung UDIFF am Ausgang des Tiefpasses.
Die deutlichen Überschwinger sind auf die schnellen Taktausgänge in Verbindung mit den Masseleitungen der Tastköpfe zurückzuführen.
Niedrige Pegel der reflektierten Spannung
Die reflektierte Spannung hat naturgemäß nur bei hohem Stehwellenverhältnis einen hohen Pegel. Je besser die Anpassung ist, umso geringer wird die Spannung, die man auswerten kann. Die nachfolgenden Messungen zeigen das Verhalten der Phasenmessung bei sinkenden Eingangsspannungen.
Alle Messungen wurden mit 90° Phasenverschiebung durchgeführt. Bis ungefähr ‑20 dBm Eingangspegel wird die PWM recht zuverlässig generiert, beginnt aber dann bereits, asymmetrisch zu werden. Das liegt daran, daß die Eingangsspannung bei dem niedrigen Pegel (ein zehntel der Spannung bei 0 dBm) erst viel später den Umschaltpunkt erreicht, der von der Eingangshysterese des Komparators bestimmt wird. Gleichzeitig wird der Schaltzeitpunkt der negativen Flanke unpräziser und beginnt zu „flattern“. Bei ‑40 dBm ist das Signal praktisch nicht mehr verwertbar und bei ‑45 dBm ist es nicht mehr vorhanden.
20 dB Unterschied zwischen UF und UR entsprechen einem SWR von 1,22. Nach der groben Abschätzung im ersten Teil dieses Beitrags reichen diese 20 dB Unterschied für eine Genauigkeit der Phasenmessung von 10°. Das scheint plausibel und deckt sich ungefähr mit der in der ‑20dBm-Messung beobachteten Phasenverschiebung.
Der Vollständigkeit halber kommen hier noch zwei Messungen mit 10 Sekunden Nachleuchtdauer.
Man erkennt hier nicht nur die durchschnittliche Phasenverschiebung sondern auch den Jitter, also den Bereich in dem sich die Phasenlage verschiebt.
Erkenntnisse und Verbesserungsideen
Stromaufnahme
Die Stromaufnahme von 100 mA ist mir zu hoch. Davon gehen etwa 25 mA auf das Konto der logarithmischen Verstärker und der Komparatoren, weitere 10 oder 15 mA werden vom CPU-Board und den LEDs verbraucht. All das kann bei Nichtgebrauch deutlich reduziert werden. Der wesentliche Stromverbrauch geht auf das Konto des CPLDs, das bereits fürs Nichtstun 60 mA zieht. Das sollte sich im Low-Power Modus auf die Hälfte reduzieren lassen, was aber dann als Dauerbetrieb immer noch viel ist. Schon im ersten Teil hatte ich angedeutet, die Auswahl des CPLDs nochmal zu überdenken.
Eingangsimpedanz
Die Eingangsimpedanz liegt etwas über 50 Ω und wird bei höheren Frequenzen kapazitiv. Daher sollten die Eingangswiderstände R40 und R41 etwas verringert werden, etwa auf 53 Ω. Außerdem sollte man bedenken, daß an diesen Widerständen eine etwas höhere Leistung verbraten werden könnte. Wenn man für den Richtkoppler 30 dB Koppeldämpfung annimmt und die hierzulande zulässige Sendeleistung von 750 Watt ansetzt, wäre man mit 1 W auf der sicheren Seite. Daher bietet es sich an, drei 160-Ω-Widerstände parallel zu schalten. Das wäre bei der 0805-er Baugröße gerade für 990 Watt Dauerbetrieb ausreichend (Spec beachten, nicht alle vertragen 330 mW).
Amplitudenmessung
Die logarithmischen Verstärker funktionieren im wesentlichen wie spezifiziert, allerdings zeigt LOGUR etwa 4 dBm zu wenig an, was etwa 1 dBm mehr ist, als das Datenblatt zulässt. Das lässt sich über einen Trimmer am INT-Eingang korrigieren, allerdings nur bis +/-3dB. Vermutlich ist eine Unsauberkeit im Testboard für den Fehler verantwortlich. Dem werde ich jetzt nicht nachgehen. Ich werde eine Korrektur in der Software für solche geringen Abweichungen vorsehen.
Phasendifferenzmessung
Die Messung der Phasendifferenz funktioniert wie erwartet. Das Signal UR_LD wird allerdings mit der CLKUF getaktet und ist damit für die Portpins eines Microcontrollers zu schnell. Ich erwarte in der Praxis keine Probleme, weil es ja nur in der Nähe der Umschaltpunkte flattert, aber es ist unschön. Ich erwäge, bei einem Redesign zwei Tiefpässe vorzusehen, einen für positive und den anderen für negative Phasenverschiebungen. Dann werden zwei Analogeingänge benötigt und über einen Pegelvergleich erkennt man die Richtung der Phasenverschiebung.
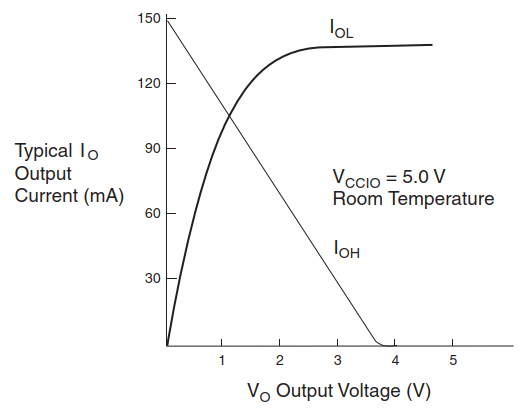
Ausgangsspannung des CPLDs
Beim genauen betrachten des Oszillogramme fällt auf, daß das CPLD an seinen Ausgängen bestenfalls 4 V erreicht, statt der erwarteten 5 V, mit denen es betrieben wird. Zur Erklärung hilft ein Blick ins Datenblatt:
Offensichtlich sind als high-side-Schalter N‑MOS-Transistoren verbaut, wodurch die Ausgangsspannung immer um deren Schwellspannung unterhalb der Versorgungsspannung liegt. Auf diesem Testboard führt das dazu, daß die LED3 etwas dunkler leuchtet, als erwartet und daß die Spannung UDIFF am Ausgang des Tiefpasses etwas geringer ist, als errechnet. Für alle anderen Zwecke reicht der Pegel völlig aus. Wäre das nicht der Fall, könnte man pull-up-Widerstände oder zusätzliche Treiber vorsehen. Die LED würde ich gegen GND schalten, statt gegen VDD.
Meßergebnisse
Hier ist das Libreoffice Calc-Spreadsheet mit den Meßergebnissen:
Wie man aus den hier gewonnenen Meßergebnissen das benötigte Anpassungsnetzwerk berechnet, habe ich bereits im Beitrag „Antennenanpassung mit LibreOffice“ erläutert. Das dort vorgestellte Spreadsheet habe ich zu diesem Zweck etwas angepasst:
Update 08.01.2025: neues Spreadsheet, das vorherige hatte ein paar kleine Fehler.
Man kann jetzt in den Zeilen 3 bis 7 direkt die gemessenen Werte in MHz und in Volt eingeben. Es folgen Umrechnungsfaktoren in den Zeilen 10 bis 13, die aus dem Datenblatt, aus Berechnungen oder aus Kalibriermessungen gewonnen werden. In den Zeilen 15 bis 20 werden die Meßwerte in die nachfolgend benötigten Parameter umgerechnet.
Zeile 27 zeigt den errechneten komplexen Reflexionsfaktor Gamma. In Zeile 29 wird aus Γ und Z0 die Impedanz der Last errechnet, danach der komplexe Leitwert und die Kreisfrequenz. In den Zeilen 33 bis 41 wird mithilfe der Kreisfrequenz der induktive bzw. kapazitive Anteil der Last berechnet und zwar einmal für Seriellschaltung und einmal für Parallelschaltung der einzelnen Elemente. Das ist rein informativ, hilft aber bei der Kontrolle der Rechnung mit SimSmith. Die verbleibenden Zeilen berechnen das nötige Anpassungsnetzwerk in LC- und CL-Topologie. Nur eines davon liefert eine realisierbare Lösung.
In diesem Blog habe ich mehrfach erwähnt, daß mein nächster Antennentuner das Stehwellenverhältnis messen und die Antenne möglichst automatisch an die Impedanz des Kabels und des Transceivers anpassen können soll. Das ist nichts neues, im Gegenteil, es ist genau das, was ein „automatischer Antennentuner“ macht.
Dieser erste Teil beschreibt die prinzipielle Idee für die Messung des Reflexionsfaktors und einen Versuchsaufbau, der die Machbarkeit des Konzepts verifizieren soll.
Der zweite Teil wird die Meßergebnisse des Versuchsaufbaus dokumentieren und Änderungen für den darauffolgenden ersten Prototypen vorschlagen.
Das Stehwellenverhältnis und der Reflexionsfaktor
Das Stehwellenverhältnis SWV (auch SWR oder VSWR genannt) zeigt an, wie gut eine komplexe Impedanz an die Signalquelle angepasst ist. Bei idealer Anpassung ist das Stehwellenverhältnis 1, bei völliger Fehlanpassung ist es unendlich. Das SWV ist eine reelle Zahl, der zugrundeliegende Reflexionsfaktor Γ ist aber komplex (komplexe Zahlen werden durch Unterstrich gekennzeichnet). Das Stehwellenverhältnis errechnet sich folgendermaßen aus dem Betrag des Reflexionsfaktors:
[1]
Dem SWV fehlt daher die Phaseninformation des rücklaufenden Signals im Vergleich zum vorlaufenden Signal. In der komplexen Reflexionsfaktorebene (dem Smith-Diagramm, hier und hier) liegen daher alle Punkte gleichen Stehwellenverhältnisses auf einem Kreis um den Nullpunkt.
Messung des Stehwellenverhältnisses
Das Stehwellenverhältnis wird mit einem Richtkoppler gemessen, beispielsweise einem Sontheimer-Frederick Richtkoppler, den ich im Beitrag „SWV-Messbrücken“ schon einmal beschrieben und mit LTSpice simuliert habe. Ich habe anschließend auch einen Prototypen aufgebaut und in „Praktischer Aufbau eines Richtkopplers“ vorgestellt und ausgemessen. Ein weiterer Beitrag beschäftigt sich mit der „Messung des komplexen Reflexionsfaktors mit einem Richtkoppler“, der die ersten theoretischen Grundlagen für den vorliegenden aktuellen Beitrag liefert.
Berechnung eines Anpassungsnetzwerks
Aus dem Stehwellenverhältnis kann man wegen seiner Mehrdeutigkeit nicht die ideale Anpassung errechnen. Herkömmliche automatische Antennentuner verfolgen daher einen iterativen Ansatz: Trial & Error. Durch möglichst intelligente Strategien wird versucht, die Anpassung sukzessive zu verbessern, bis im Idealfall ein SWV von 1 erreicht ist. Das kann je nach Strategie recht lange dauern, 10, 20 oder mehr Sekunden. Es ist ein Stochern im Nebel. Daher merken sich automatische Antennentuner eine einmal gefundene Anpassung, um sie bei der nächsten Abstimmung schnell wieder einzustellen.
Um den Nachteil des SWV zu umgehen, wäre es daher sehr nützlich, gleich den komplexen Reflexionsfaktor Γ zu messen, statt nur seinen Betrag (aus dem sich nach [1] das SWV errechnet). Im Beitrag „Antennenanpassung mit LibreOffice“ habe ich gezeigt, wie man aus Γ mit einem Spreadsheet die nötigen Anpasselemente berechnet. Damit entfällt idealerweise die möglicherweise langwierige Suche, die im schlechtesten Fall auch komplett schiefgehen kann, weil überhaupt kein Ergebnis gefunden wurde. Bei der Berechnung der idealen Anpassung ist eine quadratische Gleichung zu lösen, die zwei Lösungen hat, von denen aber eine verworfen werden kann. In der Praxis dürfte man damit ziemlich schnell sehr nahe an die ideale Anpassung kommen, was aber eine nochmalige Verbesserung durch weitere Iterationen nicht ausschließt.
Was wird zur Messung von Γ benötigt?
Was braucht man denn nun zur Messung des komplexen Reflexionsfaktors Γ? Wie bei der Messung des skalaren SWV braucht man auch für die Messung von Γ die Amplitude der vorlaufenden und der reflektierten Spannung. Die liefert der klassische Richtkoppler. Darüberhinaus benötigt man die Phasenverschiebung der rücklaufenden Welle zur vorlaufenden Welle. Das wird sofort an einem einfachen Beispiel klar: ein offenes Leitungsende gegenüber einem Kurzschluß. In beiden Fällen ist das SWV unendlich, weil jeweils die komplette Spannung reflektiert wird. Der Kurzschluß verursacht aber eine Phasendrehung um 180°, während das offene Ende die Phase beibehält. Ein klassisches Stehwellenmeßgerät kann diese Fälle nicht unterscheiden. Wie in „SWV-Messbrücken“ gezeigt wurde, steht die Phaseninformation am Ausgang des Richtkopplers aber zur Verfügung.
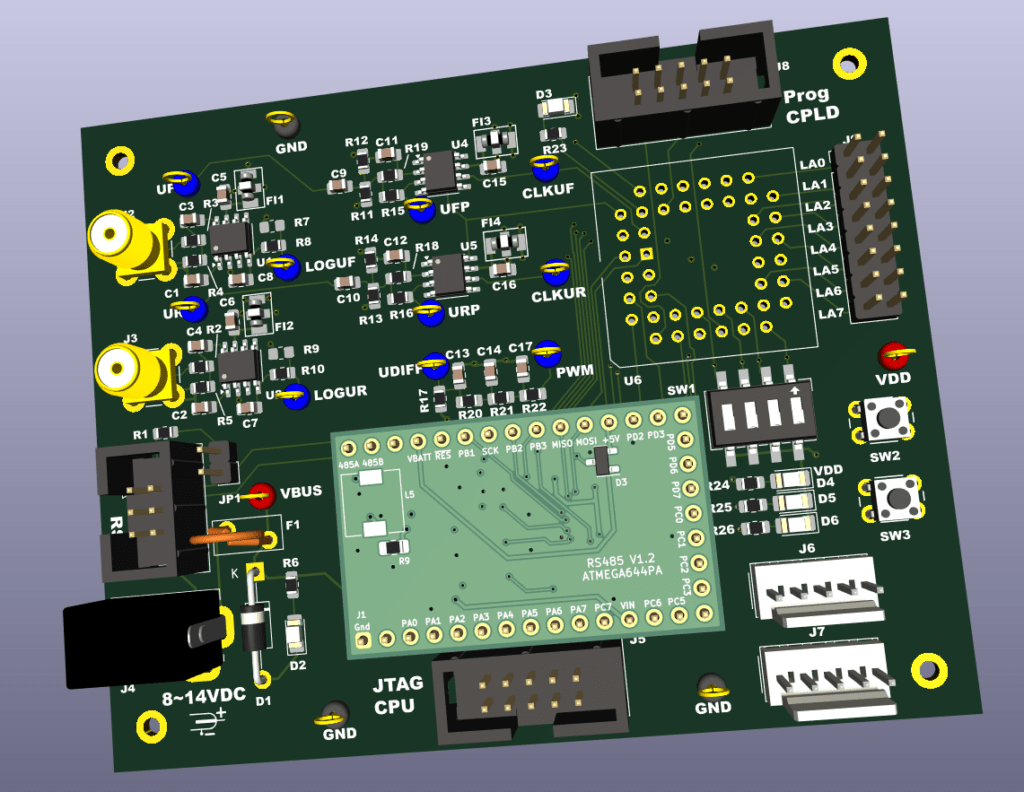
Proof-of-Concept
Wie kann ein brauchbares Γ-Meßgerät aussehen? Die Amplituden werden auf „klassische Weise“ gemessen: seit mehreren Jahrzehnten gibt es den bewährten AD8307 von Analog Devices. Das ist ein logarithmischer Verstärker mit einem Dynamikumfang von 92 dB. Er ist von DC bis 500 MHz spezifiziert und generiert eine Ausgangsspannung, die pro dB Pegeländerung am Eingang um 25 mV steigt oder fällt. Der Eingangspegel darf zwischen ‑72 dBm und +17 dBm liegen, wodurch die Ausgangsspannung nominal ungefähr zwischen 0.25 V und 2.5 V schwankt. Sie kann leicht vom AD-Wandler eines Microcontrollers erfasst werden.
Die Messung der Phasenverschiebung ist nicht ganz so einfach. Ein erster Versuch mit einem Mischer war nicht sehr erfolgversprechend. Daher habe ich mir eine digitale Lösung überlegt, die in einem programmierbaren Logikbaustein, einem CPLD, implementiert werden soll. Ich habe einen Versuchsaufbau entwickelt, der die Idee verifizieren soll, ein „proof-of-concept“. Hier der Schaltplan:
U6 ist ein 44-Pin CPLD im PLCC-Gehäuse. Mangels 3D-Modell wird es hier nicht angezeigt, es ist aber bestückt.
Schaltungsbeschreibung
Auch diese Leiterplatte nutzt wieder das ATMEGA644PA CPU-Board zur Auswertung der Messungen und zur Kommunikation mit einem Host-PC. Ein Richtkoppler ist nicht Teil dieses Boards, sondern er kann über die beiden SMA-Buchsen J2 und J3 angeschlossen werden. Für Messungen habe ich hier ein 2‑Kanal-Signalgenerator angeschlossen.
Die Eingangssignale UF (vorlaufende Spannung an J2) und UR (rücklaufende Spannung an J3) werden mit den beiden Widerständen R40 und R41 auf etwas über 50 Ω terminiert. Zusammen mit der weiteren hochohmigen Beschaltung sollte das auf die nominalen 50 Ω hinauslaufen. Das wäre im Prototypen zu verifizieren und gegebenenfalls anzupassen.
Beide Eingangssignale werden kapazitiv über C9 und C10 an die Eingänge der schnellen Komparatoren U4 und U5 gekoppelt. Die Widerstandsnetzwerke R11/R12 und R13/R14 heben den Gleichspannungspegel auf VDD/2 (etwa 2.5 V). Über R15 und R16 gelangen die HF-Signale an den jeweiligen +-Eingang des Komparators. An deren negativen Eingängen liegt jeweils der durch das Netzwerk erzeugte mittlere Gleichspannungspegel an. Die Kondensatoren C11 und C12 unterdrücken die noch vorhandenen HF-Anteile. Die Komparatoren wandeln so die Eingangssignale in digitale 5‑V-Signale um, CLKUF und CLKUR, die anschließend im CPLD weiterverarbeitet werden.
Die Eingangssignale UF und UR werden außerdem über jeweils einen 6‑dB-Spannungsteiler an die Eingänge der beiden logarithmischen Verstärker U1 und U2 geführt. Deren Ausgangsspannungen LOGUF und LOGUR gehen direkt an den AD-Konverter des Microcontrollers und werden dort ausgewertet.
Die Spannungsversorgungen dieser Analogkomponenten sind über Filter vom Typ NFE31PT222Z1 (Murata) abgeblockt. Sie sollen die störempfindlichen Komponenten gegeneinander entkoppeln.
Die weiteren Komponenten sollen nachfolgend nur kurz erwähnt werden. Die Spannungsversorgung erfolgt über J1 oder J4. Aus dieser Spannung von nominal 12VDC erzeugt das ATMEGA-Board die digitale Versorgungsspannung VDD, in diesem Fall 5V. Die LEDs D2 und D4 zeigen diese Spannungen an. Über passend dimensionierte Spannungsteiler werden sie auch den Analogeingängen PA0 und PA1 zugeführt und können von dem Controller gemessen werden. Die LEDs D5 und D6 und die Taster SW2 und SW3 gehen an CPU-Pins und werden für Testzwecke verwendet. J5 ist die JTAG-Schnittstelle zum Programmieren und Debuggen der CPU. J6 und J7 stellen eine I2C Schnittstelle zur Verfügung, die für die hier vorgestellte Anwendung irrelevant sind. U6A und U6B sind ein einziges Bauteil, das CPLD. U6B zeigt dessen Spannungsversorgung und sein Programmierinterface.
Die etwas seltsam anmutenden „krummen Werte“ bei einigen Abblockkondensatoren und Pull-Up-Widerständen haben übrigens keine besondere Bedeutung. Auf einen genauen Wert kommt es nicht an und die „geraden Werte“ in meinem Vorrat werden langsam knapp.
Das CPLD
Ein CPLD ist ein „complex programmable logic device“, ein programmierbarer Logikbaustein. Für dieses Projekt habe ich ein EPM7064 (von Altera, heute Intel) ausgewählt, von dem noch einige in der Bastelkiste lagen, sowohl im 44-Pin-PLCC- als auch im 44-Pin-QFP-Gehäuse (U6). Ich bin nicht sicher, ob die noch gefertigt werden, aber bei den üblichen Verkaufsplattformen sind sie noch bestellbar.
Anmerkung: Der Terminus „Complex“ ist etwas aus der Zeit gefallen. CPLD sind die Nachfolger der einfacheren PALs bzw. PLDs. Nach heutigem Stand sind die hier im EPM7064 verbauten 64 Logikblöcke nicht mehr besonders komplex. Das Problem der CPLDs ist für den kleinen Bastler oft deren Gehäuse. Es gibt kaum noch Bausteine mit weniger als 100 Pins. Die werden aber in vielen Fällen überhaupt nicht benötigt. Außerdem sind Bausteine mit 5V-Betriebsspannung rar geworden. Darauf wollte ich aber hier wegen der logarithmischen Verstärker und der Komparatoren nicht verzichten. Beim Design eines ersten Prototypen werde ich diese Auswahl nochmal überdenken müssen.
Das CPLD beinhaltet zwei unabhängige Funktionen: den Phasenvergleicher und einen Frequenzzähler. Beides sind im Grunde relativ einfache Funktionen.
Bei der nachfolgenden Beschreibung wird immer angenommen, daß während eines Meßzyklus die CLKUF-Frequenz immer anliegt, CLKUR gegebenenfalls aber nicht (z.B. bei idealer Anpassung). Für den hinreichenden CLKUF-Pegel muß der Benutzer sorgen, der ja bei einem herkömmlichen Antennentuner zum Abstimmen auch hinreichend Sendeleistung anbieten muß.
Der Phasenvergleich
Der Phasenvergleich bildet einfach nur das Exklusiv-Oder der beiden Taktsignale. Der Ausgang ist damit also auf low, wenn beide Pegel gleich sind und auf high, wenn beide unterschiedlich sind. Das liefert also bei exakt gleichphasigen Eingangssignalen (Phasenverschiebung 0°) ein dauerhaftes low, bei exakt gegenphasigen Signalen (+/-180°) ein dauerhaftes high. Bei Phasenverschiebungen, die dazwischen liegen, ergibt sich ein pulsweitenmoduliertes Signal, hier mit PWM bezeichnet. Es wird über einen dreifachen RC-Tiefpass gefiltert und kann als UDIFF-Signal von einem Analogeingang des Controllers erfasst werden.
UDIFF ist allerdings bei positiver Phasenverschiebung gleich groß, wie bei gleicher negativer Phasenverschiebung. Man benötigt also ein weiteres Signal, das das Vorzeichen der Phasenverschiebung anzeigt, das ist UR_LD. Es wird durch registrieren des CLKUR-Taktsignals mit der steigenden Flanke des CLKUF-Taktes erzeugt. UR_LD zeigt also einfach nur an, ob CLKUR bei der steigenden Flanke low oder high war.
Der Phasenkomparator erzeugt ein weiteres Signal namens CLKACTIVE. Es soll auf high gehen, wenn ein gültiges Taktsignal an CLKUR anliegt. Die Praxis wird zeigen, inwieweit dieses Signal zuverlässig erzeugt und ob es überhaupt benötigt wird.
Der Frequenzzähler
Im CPLD ist außerdem ein einfacher Frequenzzähler implementiert. Es ist ein 16-bit-Synchronzähler mit CLKUF als Takteingang, dessen Torzeit vom Controller erzeugt werden muß. Sie sollte in der Größenordnung von 1 ms liegen. Damit gibt es also bis etwas über 65 MHz keinen Zählerüberlauf und die Auflösung liegt bei 1 kHz. Das reicht völlig, um ein Anpaßnetzwerk mit hinreichende Genauigkeit zu berechnen.
Der Zähler wird durch einfaches Bit-banging über Port-Pins des Controllers gelöscht, gestartet, gestoppt und ausgelesen.
Der Verilog-Code
Hier präsentiere ich den aktuellen Verilog-Code und die Modelsim-Testbench für das CPLD. Der Code funktioniert soweit, wird aber wenn nötig weiter angepasst werden. Außerdem sind die Projekt-Dateien für das Compilieren mit der Quartus Entwicklungsumgebung (Quartus II 13.0sp1, neuere Versionen unterstützen das verwendete CPLD nicht mehr) dabei. All diese Werkzeuge sind kostenlos von der Intel-Website herunterladbar. Auch eine Registrierung ist für diese „alten“ Bausteine nicht mehr nötig.
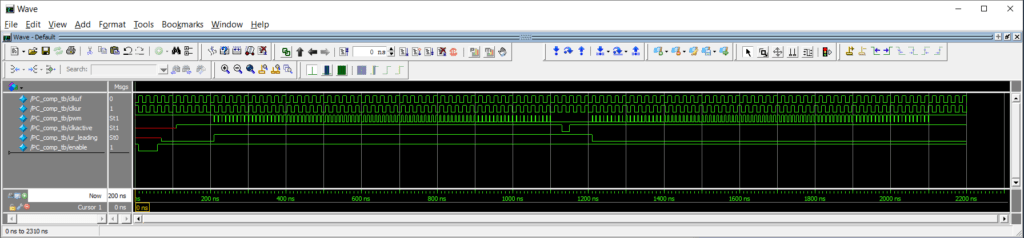
PhaseComparator.v ist der Verilog Quellcode, PC_comp_tb.v und PC_cntr_tb.v sind die Testbenches für den Phasenkomparator und den Frequenzzähler. Die beiden .do-Files sind einfache Skripte, die unter Modelsim die jeweilige Testbench ausführen. Exemplarisch soll hier nur das Simulationsergebnis für den Phasenkomparator dargestellt werden:
Modelsim Simulationsergebnis des Phasenkomparators
Die erste Zeile zeigt den vorlaufenden Takt mit konstanter Frequenz, hier 50 MHz. Die rücklaufende Spannung ist in der zweiten Zeile dargestellt. Ihre Phasenlage im Vergleich zur vorlaufenden Spannung wird nach der Initialisierungsphase ab 200ns in 1ns-Schritten geändert und jeweils für 100ns simuliert. In der dritten Zeile wird die PWM angezeigt, die von dauerhaft high nach 1100 ns auf low wechselt. Dort ist die Phasenverschiebung der Taktsignale 0°. Danach wird die Phase von clkur in den positiven Bereich verschoben und die PWM erzeugt größere Pulsbreiten, bis ab 2100 ns wieder ein konstante high-Pegel anliegt.
Die vierte Zeile zeigt das clkactive-Signal, das bei 1140 ns kurz aussetzt, weil beide Takte phasengleich sind. Das muß eventuell nochmal etwas überarbeitet werden. Die vierte Zeile zeigt ur_leading (UR_LD im Schaltplan) und gibt an, ob UR bei der steigenden Flanke von UF high oder low war. Bei 1200 ns ändert sich das Signal, weil UR nun UF nacheilt. In der Praxis wird es hier zu metastabilen Zuständen kommen, die dann per Software abgefangen werden müssen. Sie sind an dieser Stelle aber nicht besonders störend, denn ob eine Phasenverschiebung nun ‑5° oder +5° ist, wird in der Praxis nicht besonders relevant sein.
Erwartbare Betriebsdaten
Welche Leistungsdaten sind von dieser Schaltung im Vergleich mit einem handelsüblichen Antennentuner zu erwarten?
Für die Messung muß ein Sendesignal zur Verfügung stehen. Dazu wird üblicherweise eine Leistung zwischen 1 und 10 Watt verwendet (30~40 dBm). Für eine grobe Abschätzung gehe ich von einem Kopplungsverlust von 30 dB aus, den der erste praktische Aufbau gezeigt hat. Wie weit kommen wir mit 30 dBm (1 Watt) Abstimmleistung?
Die Grenzen der Pegelmessung
Wegen des Kopplungsverlustes des Richtkopplers und der 6 dB Dämpfungsglieder kommen am Eingang des AD8307A noch etwa ‑6 dBm an Leistung an. Das liegt gut in dessen zuverlässigem Arbeitsbereich. Laut Spezifikation arbeitet er bis hinunter zu ‑75 dBm. Als untere Grenze im praktischen Betrieb würde ich aber 20 dB davon wegbleiben, also nicht unter ‑55 dBm gehen. Damit wäre eine reflektierte Leistung von etwa 50 dB unter der vorlaufenden Leistung noch zuverlässig meßbar. Das ist weniger als die gemessene Richtschärfe des Probeaufbaus. Der begrenzende Faktor für die Messung des Stehwellenverhältnisses ist also nicht diese Auswerteschaltung, sondern die Richtschärfe und die Isolation des Kopplers. Bei einer Richtschärfe von 30 dB wäre das geringste meßbare Stehwellenverhältnis knapp 1,07, bei 40 dB etwa 1,02 und bei 50 dB 1,006. Für alle praktischen Fälle kann man sich mit den 30 dB und einem SWV von 1,07 zufriedengeben. Es soll ja kein hochpräzises Labormeßgerät werden.
Die Grenzen der Phasenmessung
Welche Genauigkeit kann man für die Messung der Phasenverschiebung erwarten? Das Datenblatt des TLV3501 spezifiziert eine Eingangshysterese von 6 mV (typisch). Das ist der minimale Spannungsunterschied an den Eingängen, die der Komparator sicher erkennt. Jedes Eingangssignal muß mindestens diese Spitzenspannung erreichen, damit der Komparator sicher schaltet. Für die nachfolgenden Überlegungen gehe ich davon aus, daß die Schaltung (hinreichend) symmetrisch aufgebaut ist und die beiden Komparatoren gleiche Exemplarstreuungen haben.
Nimmt man die vorlaufende Spannung UF als Referenz, dann hängt die Phasenauflösung direkt vom Stehwellenverhältnis ab, also dem Verhältnis der rücklaufenden (UR) zur vorlaufenden Spannung (UF). Bei unendlichem SWV sind beide Spannungen gleich groß und die erzielbare Phasenauflösung ist maximal. Je weiter das SWV sinkt, desto ungenauer wird die Phasenmessung. Bei einem SWV von 1 ist schließlich kein Phasenunterschied mehr meßbar, denn die reflektierte Spannung ist dann null.
Um die Genauigkeit der Phasenmessung abzuschätzen habe ich ein Calc-Spreadsheet erstellt. Es errechnet die zu erwartende Phasenabweichung für ein gegebenes Stehwellenverhältnis abhängig von der verwendeten Abstimmleistung des Senders und der Koppeldämpfung des Richtkopplers. Es ist eine Abschätzung, ohne Anspruch auf absolute Korrektheit:
Für 1 Watt Abstimmleistung errechnet sich damit eine zu erwartende Phasengenauigkeit von 11° bei einem SWV von 1,2 und von 2.2° bei einem SWV von 2.0. Erhöht man die Ausgangsleistung auf 10 Watt, dann errechnen sich für die gleichen Stehwellenverhältnisse 3,4° bzw. 0,7°.
Inwiefern diese theoretischen Werte in der Praxis erreichbar sind, müssen echte Messungen zeigen, die ich im zweiten Teil präsentieren werde.
Vor einiger Zeit bin ich bei der Programmierung auf Host-Systemen endgültig von der Win32-API auf Qt umgestiegen. Der Grund ist einfach der, daß ich mich nicht an ein Betriebssystem binden will und natürlich auch gerne eine Entwicklungsumgebung auf dem Stand der Technik benutzen will. Der Umstieg war nicht trivial, ich programmieren seit Jahrzehnten im wesentlichen in Standard‑C und wenn nötig in verschiedenen Assemblern. C++ ist zwar nicht ganz unähnlich zu C, aber der objektorientierte Ansatz hat mir doch viel Kopfzerbrechen bereitet. Inzwischen „komme ich zurecht“, auch wenn mir noch manchmal die weniger gewordenen Haare zu Berge stehen und die Frage durch den Kopf geht, was ich da überhaupt mache. Es wird, aber ein Profi in C++ bin ich noch lange nicht. Qt ist glücklicherweise hervorragend dokumentiert.
Das Qt Graphics View Framework
Als Einstieg habe ich vor ein paar Monaten die ersten Qt-Grafiken mit QPainter erstellt. Das funktioniert gut, ist aber gelegentlich etwas mühsam. Daher wurde auf QPainter aufbauend das Graphics View Framework entwickelt. Es bietet zunächst dieselben Grafikgrundfunktionen, wie auch QPainter und wahrscheinlich auch einige mehr. Man kann Punkte, Linien und Polygone zeichnen und geschlossene Formen (z.B. Rechtecke und Ellipsen) mit Mustern und Farbe füllen. Darüberhinaus bietet das Graphics View Framework aber auch interaktive Funktionen an. Man kann Grafikelemente mit der Maus auswählen und verschieben. Das muß ich ausprobieren!
Das Smith-Diagramm
Als nächstes Projekt habe ich mir einen Antennentuner mit eingebautem Richtkoppler vorgenommen. Das ist soweit nichts besonderes, aber ich möchte die reflektierte Spannung nicht nur skalar messen, sondern vektoriell. Dazu will ich auf dem Host-PC den komplexen Reflexionsfaktor darstellen, was ja nichts anderes ist als das Smith Diagramm. Grundlage dafür soll das nachfolgend vorgestellte Qt-Projekt sein. Hier ein Screenshot:
Smith-Diagramm erzeugt mit dem Qt Graphics View Framework
Dieses Testprogramm erzeugt das oben dargestellte interaktive Fenster. Die Darstellung des Smith-Diagramms ist inspiriert von SimSmith, allerdings sind hier keine weiteren Funktionen implementiert. Das Testprogramm ist also für nichts gut, außer dem Verständnis der Qt Grafikfunktionen und den Grundlagen des Smith-Diagramms. Die verwendeten Gleichungen sind auf der Seite „Das Smith-Diagramm“ kurz erläutert.
Man kann mit den Schiebereglern die Lastimpedanz einstellen und zwar unabhängig voneinander den reellen Wirk- und den imaginären Blindwiderstand. Ihre Werte kann man auch direkt in die darüberliegenden Felder eingeben. Der Marker auf dem Smith-Diagramm wird an die entsprechende Position verschoben. Die interaktiven Funktionen des Graphics View Frameworks gestatten es, den Marker direkt mit der Maus an eine neue Position zu ziehen. Die reellen und imaginären Komponenten des neuen Lastwiderstands werden dann direkt in den Feldern angezeigt und die Schieberegler werden entsprechend verschoben.
Ich denke, daß dieses Projekt auch anderen als Basis oder zumindest als Inspiration für eigene Entwicklungen dienen kann. Daher stelle ich es hier dem interessierten Leser zur freien Verfügung. Einige weitere Erläuterungen finden sich im Quelltext, ansonsten verweise ich auf die Quellen im Internet, aus denen auch ich mein Wissen bezogen habe.
Hier ist das gesamte Projekt, das sich mit Qt 6.8.1 direkt compilieren lassen sollte. Ausführbare Qt-Projekte sind ja immer etwas groß, weil die verwendeten DLLs mitgeliefert werden müssen. Wer sich nicht scheut, ausführbare Programme aus dem Internet zu starten, kann hier das Windows-Paket (64-bit) herunterladen und direkt ausführen. Es ist nach bestem Wissen und Gewissen virenfrei, aber ich empfehle eine virtuelle Maschine, dann kann nichts passieren. Die SHA1-Prüfsumme ist: 0ca574ebf32c587ab404d0e42bc7fe1174dd4351.
Vor vielen Jahren, bevor ich meine Basteleien in diesem Blog niedergeschrieben habe, hatte ich schonmal mit Microstrip-Filtern experimentiert, die ich mit meiner Fräse auf FR4 Leiterplattenmaterial erstellt hatte. Die Ergebnisse waren durchwachsen, aber durchaus ermutigend. Die Frequenz lag fast immer etwas unter der errechneten Frequenz und die Dämpfung im Durchlassbereich war mit 4 bis 10 dB eigentlich zu hoch. Nun ist die Genauigkeit einer Fräse begrenzt, weniger wegen der Mechanik sondern mehr wegen des Fräsers. Mit einem Stichel kann man die Breite und Länge einer Microstripleitung kaum genauer als 200 µm hinbekommen.
Die Filter habe ich damals mit der Studentenversion des Ansoft Designers entworfen. Das ist ein sehr schönes Werkzeug, das vom ´Hersteller leider schon lange nicht mehr angeboten wird. Der leider kürzlich verstorbene Gunthard Kraus durfte es aber weiterhin auf seiner Website verteilen. Ich empfehle jedem Interessenten es möglichst schnell von dort herunterzuladen, denn es ist unklar, wer die Website am Leben hält. Sie könnte verschwinden und das wäre ausgesprochen schade.
In einer der letzten Ausgaben des Funkamateur habe ich einen Link auf die Website von „Marki microwave“ gefunden. Neben einem LC-Filter Design-Tool bieten sie dort auch ein kostenloses Microstrip Filter Design Tool an. Es kann Butterworth- und Tschebyscheff-Tiefpass- und Bandpassfilter berechnen. Die Bandpässe werden als Interdigitalfilter erzeugt. Sie bestehen aus mehreren parallelen Streifenleitungen, deren Anzahl der Filterordnung entspricht. Das Designwerkzeug errechnet Länge, Breite und Abstand dieser Streifenleitungen für ein vorgegebenes Frequenzband und Leiterplattenmaterial.
Beispiel-Filter
Da ich sowieso gerade Leiterplatten bestellen wollte, habe ich exemplarisch ein paar Filter dritter und fünfter Ordnung für das 23-cm-Band und das 13-cm-Band entworfen. Mal schauen, wie sie funktionieren. Hier die Entwurfsparameter:
Für alle gilt: Doppelseitige Leiterplatten, 0,8 mm dick (Dielektrikum 0,7 mm), εr=4,4, 35 µm Cu, Eingangs- und Ausgangsimpedanz 50 Ω, 0,1 dB Ripple (Tschebyscheff)
Um den Einfluss des Lötstopplacks zu testen, habe ich die 23-cm-Filter mal mit und mal ohne Lötstopplack auf dem Filter fertigen lassen.
Die KiCad-Designs
Hier die 3D-Ansichten:
13-cm-Filter, Oberseite13-cm-Filter, Unterseite23-cm-Filter, Oberseite23-cm-Filter, Unterseite23-cm-Filter, Unterseite, Version ohne Lötstopplack
Alle vier Filtervarianten sind jeweils auf einer Leiterplatte untergebracht. Von den 23-cm-Filtern habe ich eine Variante ohne Lötstopplackabdeckung fertigen lassen. Die Strukturen sind bleifrei verzinnt, nicht vergoldet, wie die 3D-Ansicht vermuten lässt.
In KiCad sind die Designs als Footprint angelegt, bei dem jede einzelne Streifenleitung als Pad definiert ist. Das ist etwas mühsam und ich bin auch nicht sicher, ob es bei KiCad nicht doch einen besseren Weg dafür gibt. Man könnte sicherlich ein Skript schreiben, das war mir als Anfänger aber zu viel Arbeit. Ich habe stattdessen ein Calc-Spreadsheet aufgesetzt, das die einzelnen Dimensionen aus dem Ergebnis des Filterdesigns berechnet. Die Koordinaten muß man dann halt von Hand in KiCad übertragen, eine mühsame und fehleranfällige Arbeit. Hier sind die KiCad-Designs zum Herunterladen:
In den Verzeichnissen „Design“ finden sich jeweils die Calc-Spreadsheets und die von der Design-Website generierten Touchstone-Dateien. Die sollen nachfolgend mit den tatsächlich gemessenen Werten verglichen werden. Außerdem habe ich mir die Mühe gemacht, die Designs in den Ansoft-Designer zu übertragen, um seine Simulationsergebnisse auch noch zu vergleichen. Diese Designs und die generierten s2p-Dateien stehen in den Unterverzeichnissen namens „Ansoft-Simulation“. In den Verzeichnissen „Messung“ sind die nachfolgend beschriebenen Meßergebnisse zu finden.
Filter für 23 cm
Messergebnisse
Hier zunächst mal nur die einzelnen Meßergebnisse für die 23-cm-Filter:
23-cm-Butterworth-Filter 3. Ordnung, ohne Lötstoppmaske23-cm-Butterworth-Filter 3. Ordnung, mit Lötstoppmaske23-cm-Chebyshev-Filter 3. Ordnung, ohne Lötstoppmaske23-cm-Chebyshev-Filter 3. Ordnung, mit Lötstoppmaske23-cm-Butterworth-Filter 5. Ordnung, ohne Lötstoppmaske23-cm-Butterworth-Filter 5. Ordnung, mit Lötstoppmaske23-cm-Chebyshev-Filter 5. Ordnung, ohne Lötstoppmaske23-cm-Chebyshev-Filter 5. Ordnung, mit Lötstoppmaske
Gemessen wurde mit dem VNWA von DG8SAQ. Es ist zu beachten, daß er eigentlich nur bis 1,3 GHz spezifiziert ist, den Ergebnissen bei höheren Frequenzen also mit dem entsprechenden Mistrauen zu begegnen ist.
Wie oben schon kurz erwähnt, habe ich die 23-cm-Filter mal ohne (links) und mal mit (rechts) Lötstopplack fertigen lassen, um deren Einfluß abzuschätzen. Die Durchlaßdämpfung s21 ist jeweils in grün dargestellt, die Rückflußdämpfung s11 in blau. Die Markierung zeigt die 3‑dB-Filterbandbreite. Die Marker 2 und 3 stellen jeweils die Bandgrenzen dar, Marker 1 zeigt das Maximum innerhalb der Durchlassbandbreite und Marker 4 die Mittenfrequenz.
Für alle 23-cm-Filter wurde als untere Grenze des Durchlaßbereichs 1240 MHz gewählt, als obere Grenze 1300 MHz, also das 23-cm-Amateurfunkband. Die Bandbreite sollte also in allen Fällen 60 MHz betragen und die Mittenfrequenz 1270 MHz. Die gemessene Bandbreite liegt bei allen Filtern zwischen 60 und 95 MHz und entspricht damit der angestrebten Bandbreite im Rahmen des Erwartbaren.
Wie schon bei den selbstgefrästen Filtern liegt allerdings die Mittenfrequenz aller Filter deutlich unterhalb der errechneten. Im Mittel liegen die Mittenfrequenzen der Filter ohne Lötstopplack bei 1176 MHz. Der Lötstopplack zieht die Mittenfrequenzen weiter herunter auf 1158 MHz. Die Abweichungen der einzelnen Filter von diesen Mittelwerten sind gering. Die Ursache für diese Abweichungen ist für mich nicht ergründbar. Sie kann in abweichenden mechanischen und elektrischen Parametern des verwendeten Leiterplattenmaterials liegen oder in Fehlern im Designprogramm. Bei zukünftigen Entwürfen werde ich daher schlichtweg die Designfrequenz entsprechend der Messungen iterativ anpassen. Bei Strukturen ohne Lötstopplack werde ich die Designfrequenz um 8% erhöhen, mit Lötstopplack um 9,65%.
Auch die Dämpfung der Filter lässt leider zu wünschen übrig. Die Filter dritter Ordnung dämpfen das Signal im Durchlaßbereich um 4,5 bis 5,5 dB, diejenigen fünfter Ordnung um 7 bis 8,5 dB. Das ist leider auch nicht besser, als bei den ehemals selbstgefrästen Filtern. Im Frequenzbereich jenseits von 1 GHz kann man von FR4 offensichtlich nicht mehr erwarten.
Vergleich mit den Simulationen
Das Microstrip Filter Design Tool von Marki microwave kann freundlicherweise das simulierte Verhalten des entworfenen Filters als Touchstone-Datei auf dem PC abspeichern. Gleiches gilt für den Ansoft Designer. Auch wenn es etwas in Arbeit ausgeartet ist, habe ich für alle Filter die gemessene und die simulierte Duchlassdämpfung in jeweils einer vergleichenden Grafik zusammengefasst. Hier sind die Ergebnisse:
23-cm-Bandpass, Butterworth, 3. Ordnung
Vergleich der Durchlassdämpfung ohne und mit Lötstopplack zu den Simulationen mit Ansoft Designer und der Entwurfssoftware von Marki Microwave23-cm-Bandpass, Chebyshev, 3. Ordnung
Vergleich der Durchlassdämpfung ohne und mit Lötstopplack zu den Simulationen mit Ansoft Designer und der Entwurfssoftware von Marki Microwave23-cm-Bandpass, Butterworth, 5. Ordnung
Vergleich der Durchlassdämpfung ohne und mit Lötstopplack zu den Simulationen mit Ansoft Designer und der Entwurfssoftware von Marki Microwave23-cm-Bandpass, Chebyshev, 5. Ordnung
Vergleich der Durchlassdämpfung ohne und mit Lötstopplack zu den Simulationen mit Ansoft Designer und der Entwurfssoftware von Marki Microwave
Der Ansoft Designer liegt in allen Fällen näher am tatsächlichen Ergebnis, als das Microstrip Filter Design Tool von Marki microwave, mit dem diese Filter ja entworfen wurden. Außerdem berücksichtigt der Ansoft Designer den Verlustfaktor des Materials, den ich FR4-typisch mit 0,02 angegeben habe. Offensichtlich ist er in Wahrheit etwas besser. Durch iteratives Ausprobieren habe ich einen Verlustfaktor von 0,012 bis 0,014 gefunden, der die tatsächliche Dämpfung am ehesten annähert.
Da mein vektorieller Netzwerkanalysator nur bis 1,3 GHz verwendbar ist, wurden diese Messungen im 13-cm-Band mit einem Siglent SSA3032X-Plus Spektrumanalysator und dem eingebauten Trackinggenerator durchgeführt. Daher fehlen hier die Reflexionsmessungen. Die Meßdaten wurden als CSV-Datei abgespeichert und händisch in das s1p-Touchstone-Format konvertiert, das zur Darstellung von der VNWA-Betriebssoftware eingelesen wurde.
Die Markierung zeigt die 3‑dB-Filterbandbreite. Wie bei den 23-cm-Filtern stellen die Marker 2 und 3 jeweils die Bandgrenzen dar, Marker 1 zeigt das Maximum innerhalb der Durchlassbandbreite und Marker 4 die Mittenfrequenz.
Für alle 13-cm-Filter wurde beim Design als untere Grenze des Durchlaßbereichs 2320 MHz gewählt, als obere Grenze 2450 MHz. Die Bandbreite sollte also in allen Fällen 130 MHz betragen und die Mittenfrequenz 2385 MHz. Die gemessene Bandbreite liegt bei allen Filtern zwischen 100 und 150 MHz und entspricht auch hier hinreichend genau der angestrebten Bandbreite.
Auch hier liegt die Mittenfrequenz aller Filter deutlich unterhalb der errechneten. Im Mittel liegen die Mittenfrequenzen bei 2191 MHz. Hier wurde nur die Variante mit Lötstopplack gefertigt. Die Abweichungen der einzelnen Filter von diesem Mittelwert sind größer als bei den 23-cm-Filtern. Aus dem Mittelwert errechnet sich ein Zuschlag von 8,9% zu den Zielfrequenzen. Statt 2385 MHz werde ich also ein zukünftiges Filter für eine Mittenfrequenz von 2385 * 1,089 ≅ 2600 MHz entwerfen.
Auch hier ist die Dämpfung der Filter erschreckend hoch. Eine deutliche Ausnahme bildet das Butterworth-Filter dritter Ordnung. Das schneidet mit gut 4 dB Dämpfung für den Frequenzbereich und FR4-Leiterplattenmaterial sogar ausgesprochen gut ab. Ich habe die Messungen mehrfach wiederholt und keine plausible Erklärung für die deutlichen Unterschiede gefunden.
Vergleich mit den Simulationen
Die Meßwerte werden auch hier wieder mit den Simulationen in einer vergleichenden Grafik zusammengefasst. Hier sind die Ergebnisse:
13-cm-Bandpass, Butterworth, 3. Ordnung Vergleich der Durchlassdämpfung zu den Simulationen mit Ansoft Designer und der Entwurfssoftware von Marki Microwave13-cm-Bandpass, Butterworth, 5. Ordnung Vergleich der Durchlassdämpfung zu den Simulationen mit Ansoft Designer und der Entwurfssoftware von Marki Microwave13-cm-Bandpass, Chebyshev, 3. Ordnung Vergleich der Durchlassdämpfung zu den Simulationen mit Ansoft Designer und der Entwurfssoftware von Marki Microwave13-cm-Bandpass, Chebyshev, 5. Ordnung Vergleich der Durchlassdämpfung zu den Simulationen mit Ansoft Designer und der Entwurfssoftware von Marki Microwave
Auch hier liegt der Ansoft Designer näher am tatsächlichen Ergebnis, als das Microstrip Filter Design Tool von Marki microwave, aber der Unterschied ist nicht mehr signifikant. Im Grunde bestätigt der Ansoft Designer sogar den Entwurf des Microstrip Filter Design Tools. Als Verlustfaktor wurde für diese 13-cm-Filter 0,014 gewählt, was ja im Falle des Butterworth-Filters dritter Ordnung auch sehr gut passt.
Bei nächster Gelegenheit werde ich nochmal einige Teststrukturen entwickeln und fertigen lassen. Dabei werde ich dann vor allem versuchen, die gewünschte Durchlassfrequenz genauer zu treffen. Auch ein Tiefpass wäre mal einen Versuch wert. Ich werde berichten…